11 basic drive functions – Lenze 9400 User Manual
Page 578
11
Basic drive functions
11.14
Pole position identification
578
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Behaviour after mains ON
Behaviour after encoder error
Behaviour after resolver error
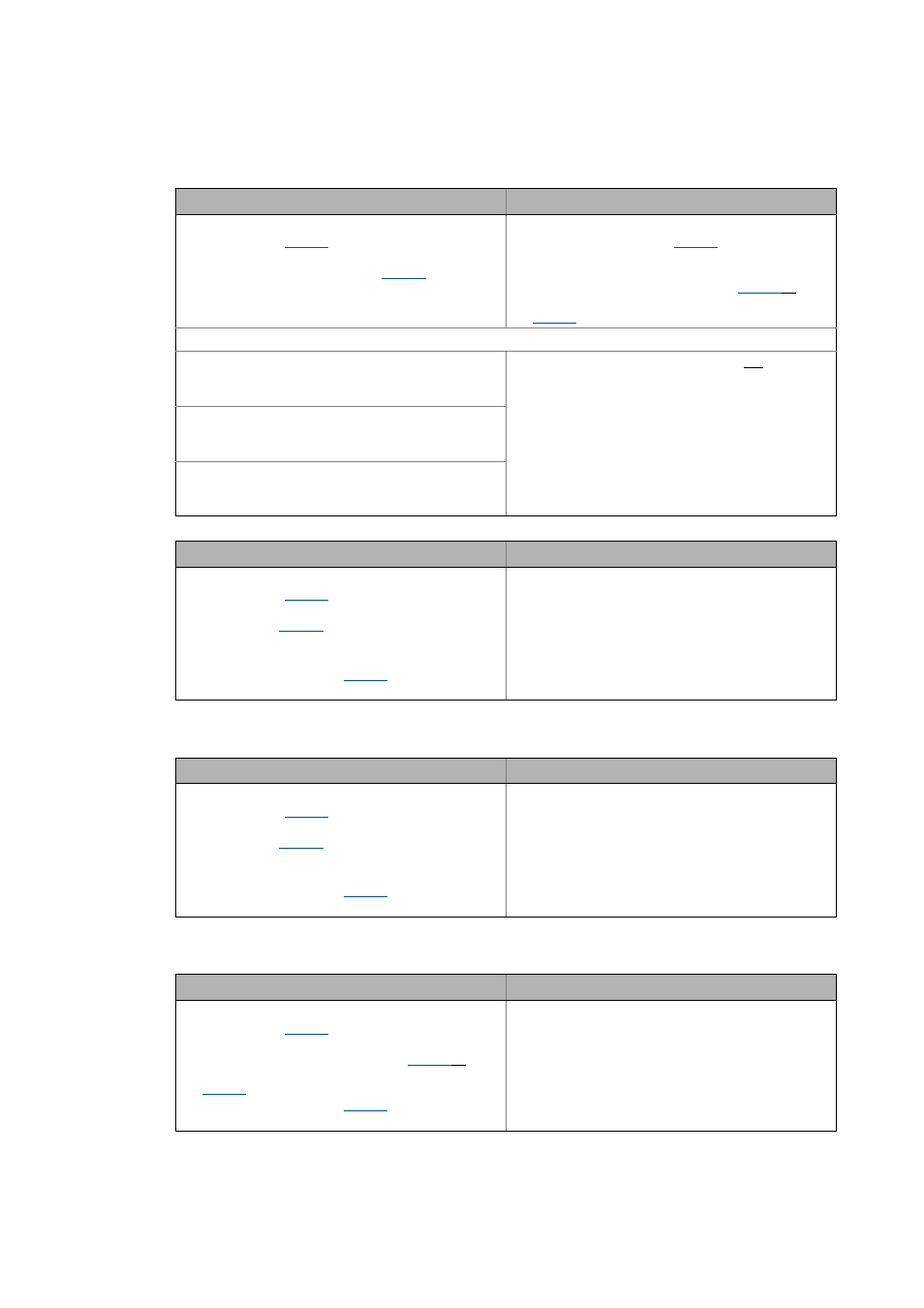
Initial situation 1
Behaviour after mains ON
• PPI_bPolePositionAvailable = TRUE
• Motor control (
) = "1: SC: Servo control sync.
motor"
• Resolver - number of pole pairs (
PPI_bPolePositionAvailable is only reset to FALSE if:
• Motor encoder selection (
) = "0: Resolver to
X7"
AND
• The number of motor pole pairs are (
integer multiple of the number of resolver pole pairs
(
).
Examples:
MSC motor
Motor - number of pole pairs = 4
Resolver - number of pole pairs = 1
The PPI_bPolePositionAvailable output is not reset to
FALSE.
Kuka motor
Motor - number of pole pairs = 4
Resolver - number of pole pairs = 4
Torque motor
Motor - number of pole pairs = 12
Resolver - number of pole pairs = 6
Initial situation 2
Behaviour after mains ON
• PPI_bPolePositionAvailable = TRUE
• Motor control (
) = "1: SC: Servo control sync.
motor"
• "0: Incremental encoder (TTL signal)" or
• "1: Sine/Cosine encoder"
• Motor encoder selection (
) = "1: Encoder to
X8"
PPI_bPolePositionAvailable is reset to FALSE.
Initial situation
Behaviour after encoder error
• PPI_bPolePositionAvailable = TRUE
• Motor control (
) = "1: SC: Servo control sync.
motor"
• "0: Incremental encoder (TTL signal)" or
• "1: Sine/Cosine encoder" or
• Motor encoder selection (
) = "1: Encoder to
X8"
PPI_bPolePositionAvailable is reset to FALSE.
Initial situation
Behaviour after resolver error
• PPI_bPolePositionAvailable = TRUE
• Motor control (
) = "1: SC: Servo control sync.
motor"
• The number of motor pole pairs are (
no
integer multiple of the number of resolver pole pairs
(
).
• Motor encoder selection (
) = "0: Resolver to
X7"
PPI_bPolePositionAvailable is reset to FALSE.