11 basic drive functions – Lenze 9400 User Manual
Page 530
11
Basic drive functions
11.12
Brake control
530
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
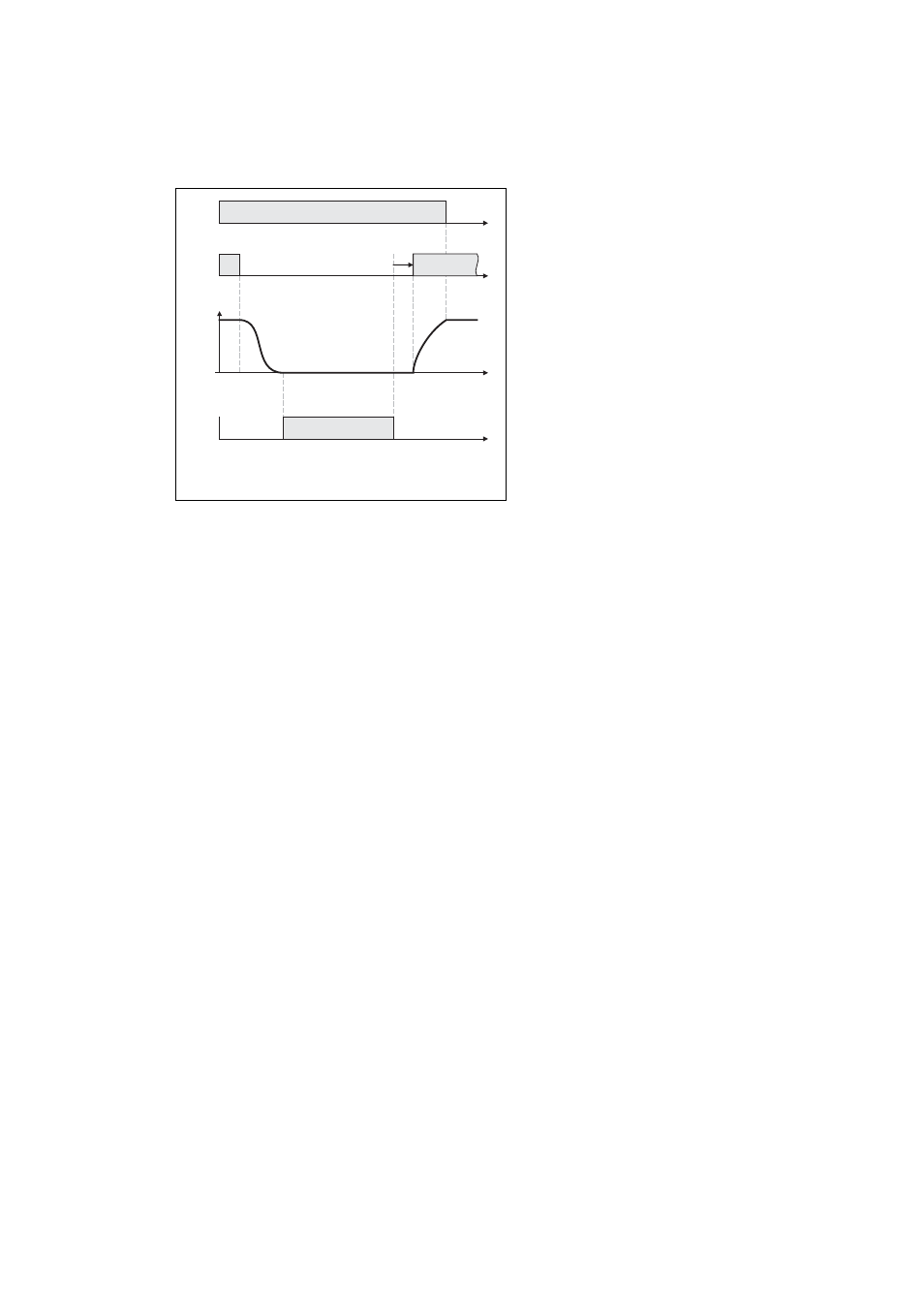
Motor magnetising time (only with asynchronous motor)
[11-36] Considering the motor magnetising time taking the PM brake as an example
Motor magnetising time
CINH = controller inhibit
• When an asynchronous motor is used, first
the magnetic field required for the holding
torque is created (which is already
available when a synchronous motor is
used) after the controller inhibit is
deactivated.
• The brake is only released if the actual
torque has reached 90 % of the
feedforward control torque.
t
t
t
CINH
t
Stopping/Standstill
BRK_bReleaseBrakeOut
I
BRK