5motor interface – Lenze 9400 User Manual
Page 133
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
133
5
Motor interface
5.3
Adjusting motor and controller to each other
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
• The ramp time can be adjusted proportionally in
.
• For large machines and high mass inertia values, the ramp time usually has to be increased.
• For small machines, a reduction of the ramp time can speed up the pole position
identification process.
• In some situations it may be helpful to reverse the travel direction (
) for the pole position
identification (e.g. for linear motor at the end stop).
• The "pole position identification 360°" procedure comprises a plausibility check. If the rotor
position determined via the encoder system does not correspond to the controlled output
position:
• the pole position identification procedure is aborted.
• the response parameterised in
(Lenze setting: "Fault") is activated.
• the error message "Pole position identification cancelled" is entered into the logbook of the
controller.
• The preset fault tolerance for the plausibility check can be changed via
Parameters for the pole position identification with minimal movement
• The current amplitude can be adjusted proportionally in
• For large machines and high mass inertia values or for linear direct drives, the current
amplitude usually has to be increased.
• The Lenze setting "100 %" corresponds to the smaller of the two following values:
Note!
If the current amplitude is set to 100 % in
>, the device utilisation (Ixt)
monitoring and/or one of the motor monitoring functions may respond and cause the
abort of the pole position identification.
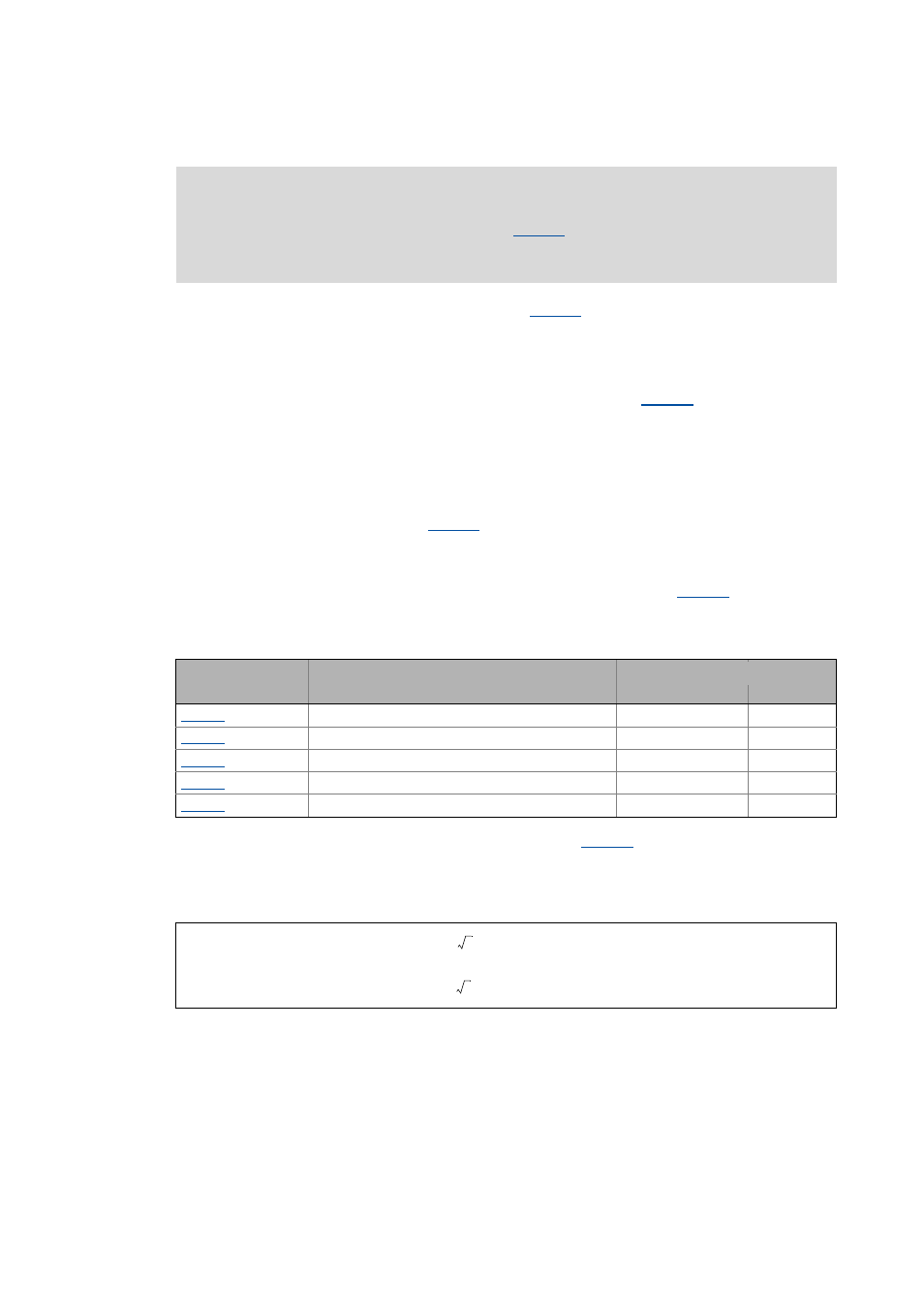
Parameter
Info
Lenze setting
Value Unit
PolePosId min.mov. cur. amp.
100 %
PolePosId min.mov. cur.rise rate
100 %
PolePosId min.mov. gain Vp
0
PolePosId min.mov. reset time Tn
62.5 ms
PolePosId min.mov. max.perm.mov.
20 °
or
25 %
2 Rated device current
⋅
⋅
25 %
2 Rated motor current
⋅
⋅