Mode 14: positive direction to torque limit, Mode 15: negative direction to torque limit, 11 basic drive functions – Lenze 9400 User Manual
Page 438
11
Basic drive functions
11.6
Homing
438
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
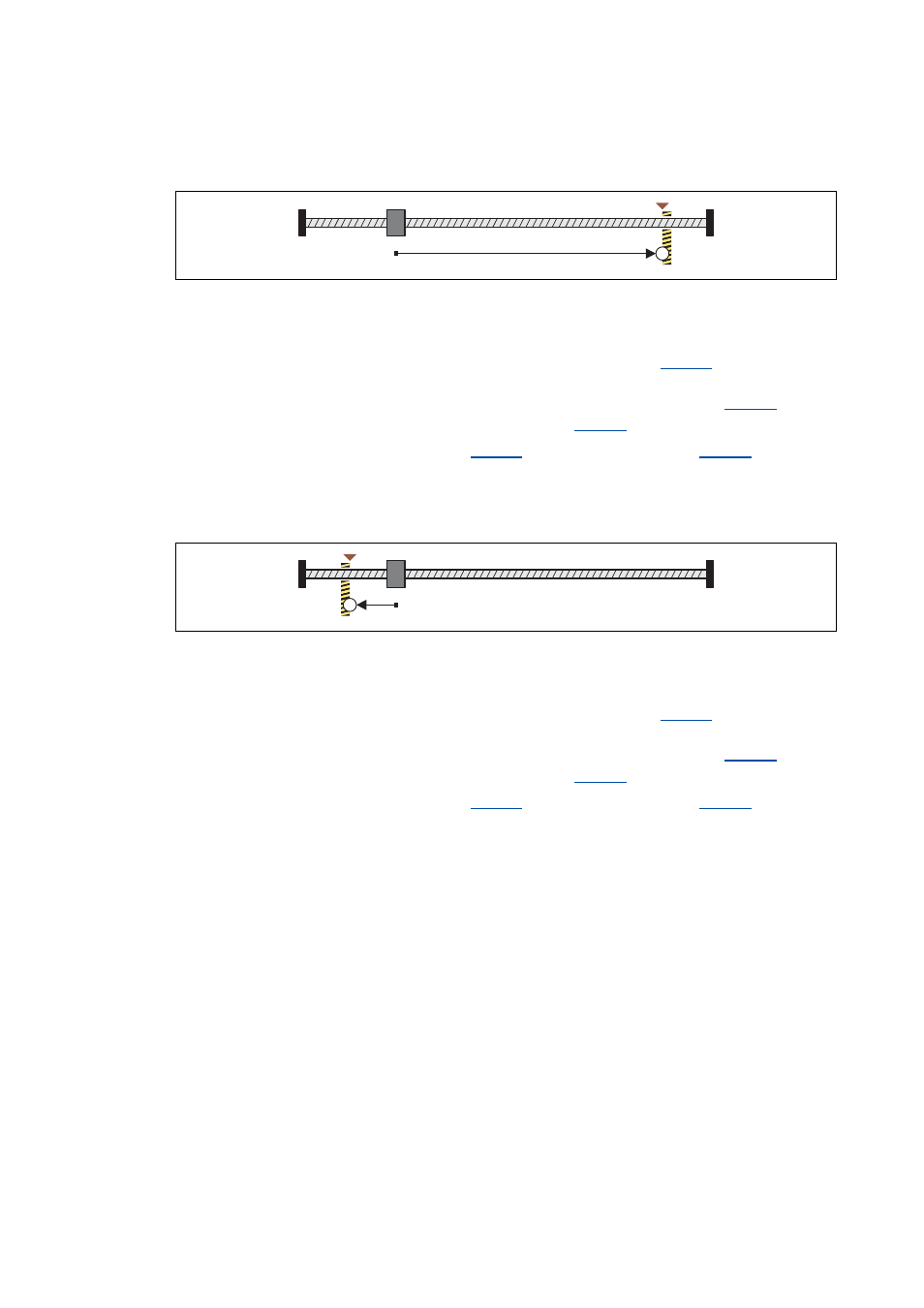
Mode 14: positive direction to torque limit
Procedure:
1. Movement in a positive direction with reduced torque and profile data set 1.
2. The reference is set if the two following conditions for the time set in
are fulfilled at the
same time:
• The current speed is lower than the threshold for standstill detection set in
• Current torque is greater than the torque limit set in
("Homing to end stop").
3. Absolute positioning to target position (
) with profile data set 2 (if
= "0").
Mode 15: negative direction to torque limit
Procedure:
1. Movement in a negative direction with reduced torque and profile data set 1.
2. The reference is set if the two following conditions for the time set in
are fulfilled at the
same time:
• The current speed is lower than the threshold for standstill detection set in
• Current torque is greater than the torque limit set in
("Homing to end stop").
3. Absolute positioning to target position (
) with profile data set 2 (if
= "0").
1
1