11 basic drive functions – Lenze 9400 User Manual
Page 534
11
Basic drive functions
11.12
Brake control
534
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
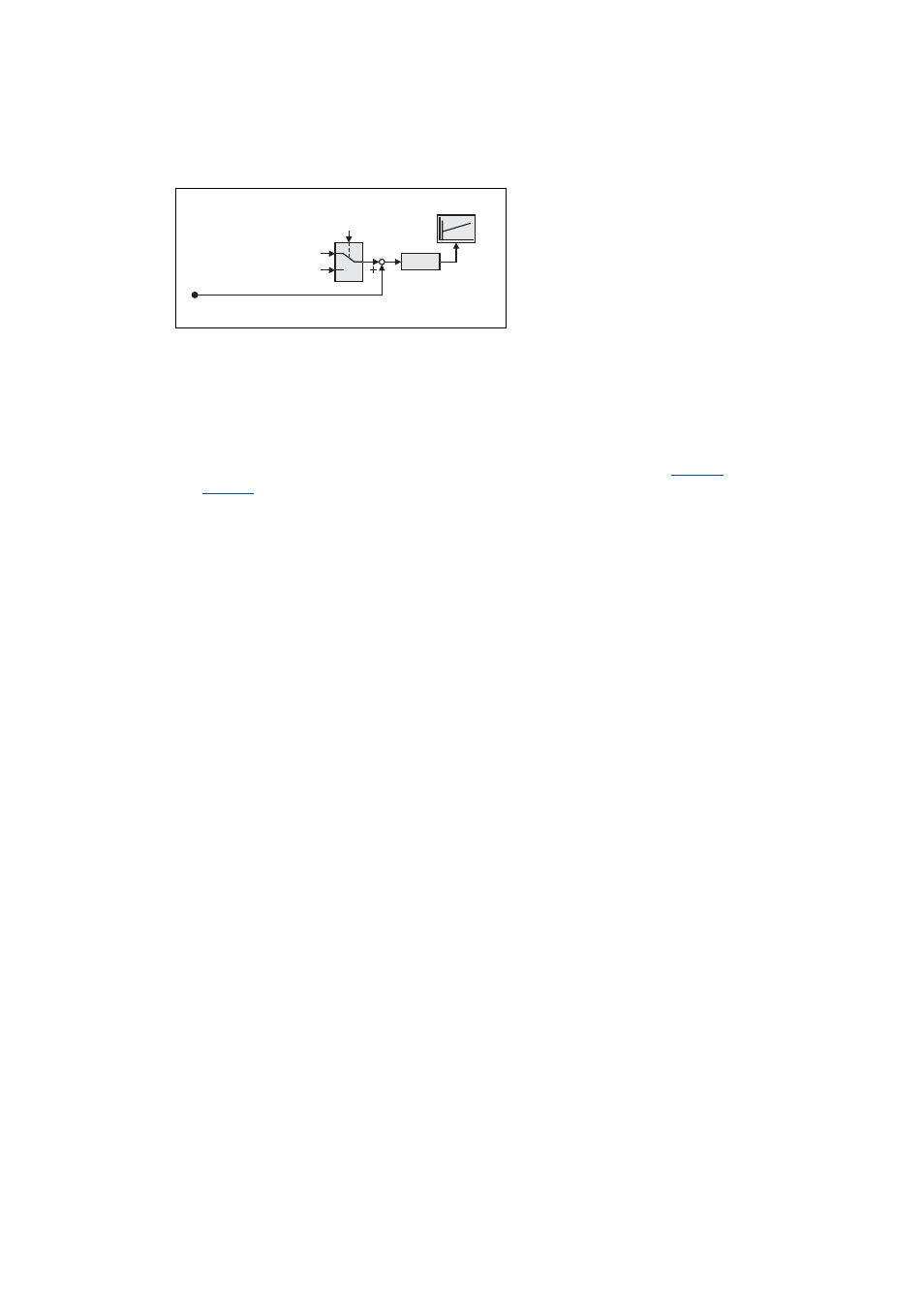
Further torque feedforward control options
[11-40] Feedforward control with parameterised starting torque
Application example:
In the case of a hoist drive, the load is always known. For an optimum behaviour a torque
proportional to the load and additionally 10 Nm as a constant feedforward control value should be
loaded into the speed controller.
• As a constant feedforward control value the starting torque 1 is used (
="10 Nm",
= "0", and BRK_bStartingTorque2 = FALSE).
• Via the input BRK_dnTorqueAdd_n the torque is specified proportional to the load.
• Via the input BRK_dnTorqueAdd_n an
additional feedforward control value can
be defined.
Note:
The input is read out if the brake receives a
release signal, e.g. when
BRK_bReleaseBrake = TRUE.
1
0
BRK_dnTorqueAdd_n
CTRL
Speed controller