2 signal flow, Signal flow - position follower, 11 basic drive funct ions – Lenze 9400 User Manual
Page 487: 8 position followe r
11
Basic drive funct
ions
11.8
Position followe
r
Lenze ·
Servo-I
nvert
er
9400 Hi
ghL
ine ·
Refer
ence m
anual
· DM
S
10.
0
EN
·
11/2013 ·
TD05/06
48
7
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_
11.8.2
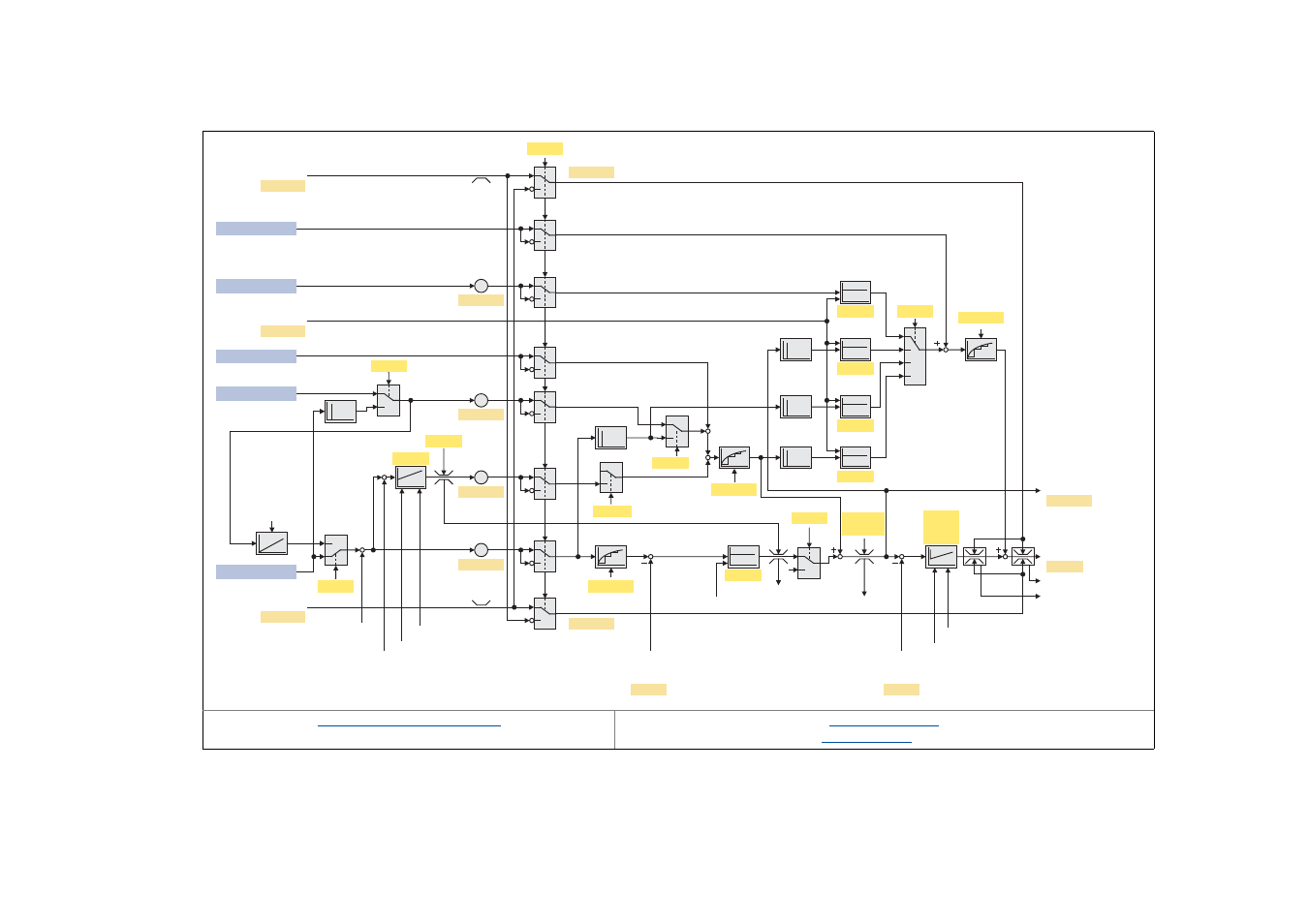
Signal flow
[11-22] Signal flow - position follower
... Signals from
Signal flow - encoder evaluation
FDB_... = input/output signals of the
MI_... = input/output signals of the
1
0
2
2
1
1
0
1
0
PF_dnAccAdd_x
1
0
PF_dnPositionSet_p
1
0
1
0
MI_bSpeedCtrlLimited
MI_bTorqueSetpointLimited
MI_dnTorqueSetpoint_n
MI_bResetSpeedCtrlIntegrator
MI_dnSpeedSetpoint_n
MI_dnSpeedCtrlAdapt_n
PF_dnSpeedAdd2_n
PF_dnTorqueAdd_n
1
0
1
0
2
1
i
i
i
MI_dnPosCtrlAdaptLoad_n
MI_bPosCtrlIntegratorOn
0
1
FDB_dnActualPos_p
FDB_dnPosOffset_p
MI_dnPosCtrlAdaptMotor_n
MI_bPosCtrlLimited
MI_bSpeedSetpointLimited
PF_dnSpeedAdd1_s
Vp
Tn
Td
0
C02559/1
1
0
C02527
0
MI_dnTorqueHighLimit_n
C02568/4
1
0
0
MI_dnTorqueLowLimit_n
C02568/5
C02559/2
i
MI_dnInertiaAdapt_n
C02568/8
1
0
C02681
0
3
C00254
C00273
C00273
C00276
C00275
C00909/1
C00909/2
C00070
C00071
C00072
C02531/3
C00770
C00772
C02680
C02550/1
C02570
C00050/1
C02550/2
C02570
C02550/3
C00273
C00776
C02556
C02531/3
C02531/3
C02531/3
C02553
C00273
Interpolator
Phase controller
Interpolator
Speed controller
Interpolator
Position controller
Actual position value
Encoder evaluation
Motor position
Encoder evaluation
Motor speed
Encoder evaluation
(3)
(5)
(1)
(4)
(9)
(8)
(2)
(6)
(7)