Signal flow (servo control for synchronous motor), 5motor interface – Lenze 9400 User Manual
Page 159
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
159
5
Motor interface
5.4
Servo control (SC)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.4.2
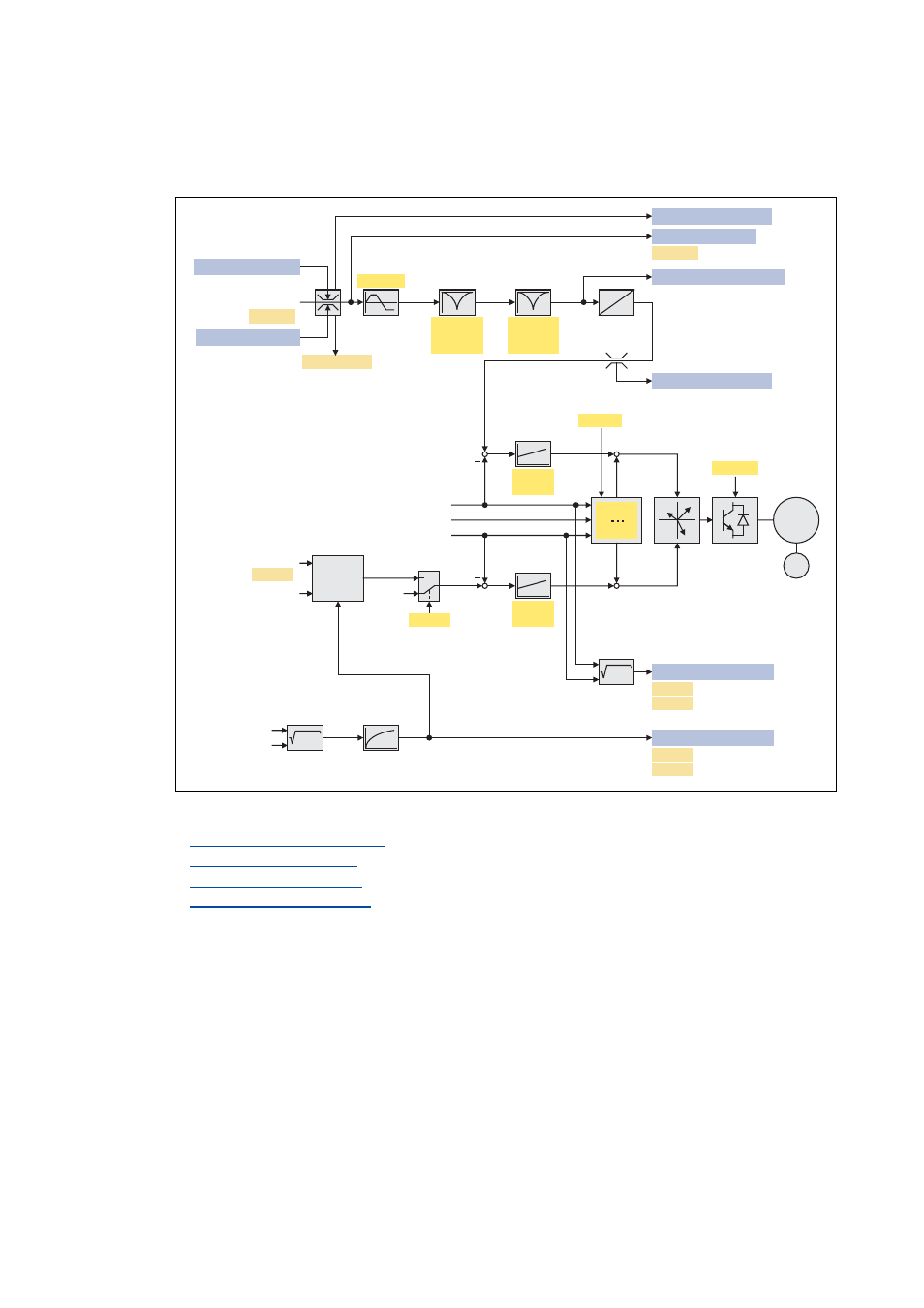
Signal flow (servo control for synchronous motor)
[5-6]
Signal flow - servo control for synchronous motor
See also:
Signal flow - encoder evaluation
Signal flow - position follower
MCTRL_dnInputJerkCtrl
C00776
C00274
C00270/1
C00271/1
C00272/1
C00270/2
C00271/2
C00272/2
(1)
(2)
(3)
C02559/1...2
C00695
C00052
M
I
a +b
2
2
usq
usd
C00075
C00093
C00783
C00018
C00074
C00079
C00091
(4)
(5)
(10)
(11)
(7)
(6)
(14)
M
G
Vp
Tn
Vp
Tn
C00076
C00075
C00076
MI_dnTorqueHighLimit_n
MI_dnTorqueLowLimit_n
MI_dnTorqueSetpoint_n
MI_dnFilteredTorqueSetpoint_n
MI_bCurrentSetpointLimited
a +b
2
2
MI_dnActualMotorCurrent_n
MI_dnActualMotorVoltage_n
MCTRL_dwMotorVoltageAct
MCTRL_dnImotAct
C00780
C00054
MI_bTorqueSetpointLimited
0
1
C00092
0 A
(8)
(9)
Max. acceleration change
Bandwitdh 1
Bandwidth 2
Torque setpoint
Current controller
Current controller
Voltage limit
Rotating field frequency
Actual Q-current
Actual D-current
Motor type
Motor voltage
Pilot control current controller
Switching frequency
Internal torque limit
Fieldweaking
Coordinate
transformation
Motor current
Magnetising current
Field
current
calculation