4 priorities, Priorities, 11 basic drive functions – Lenze 9400 User Manual
Page 378
11
Basic drive functions
11.1
General information
378
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
11.1.4
Priorities
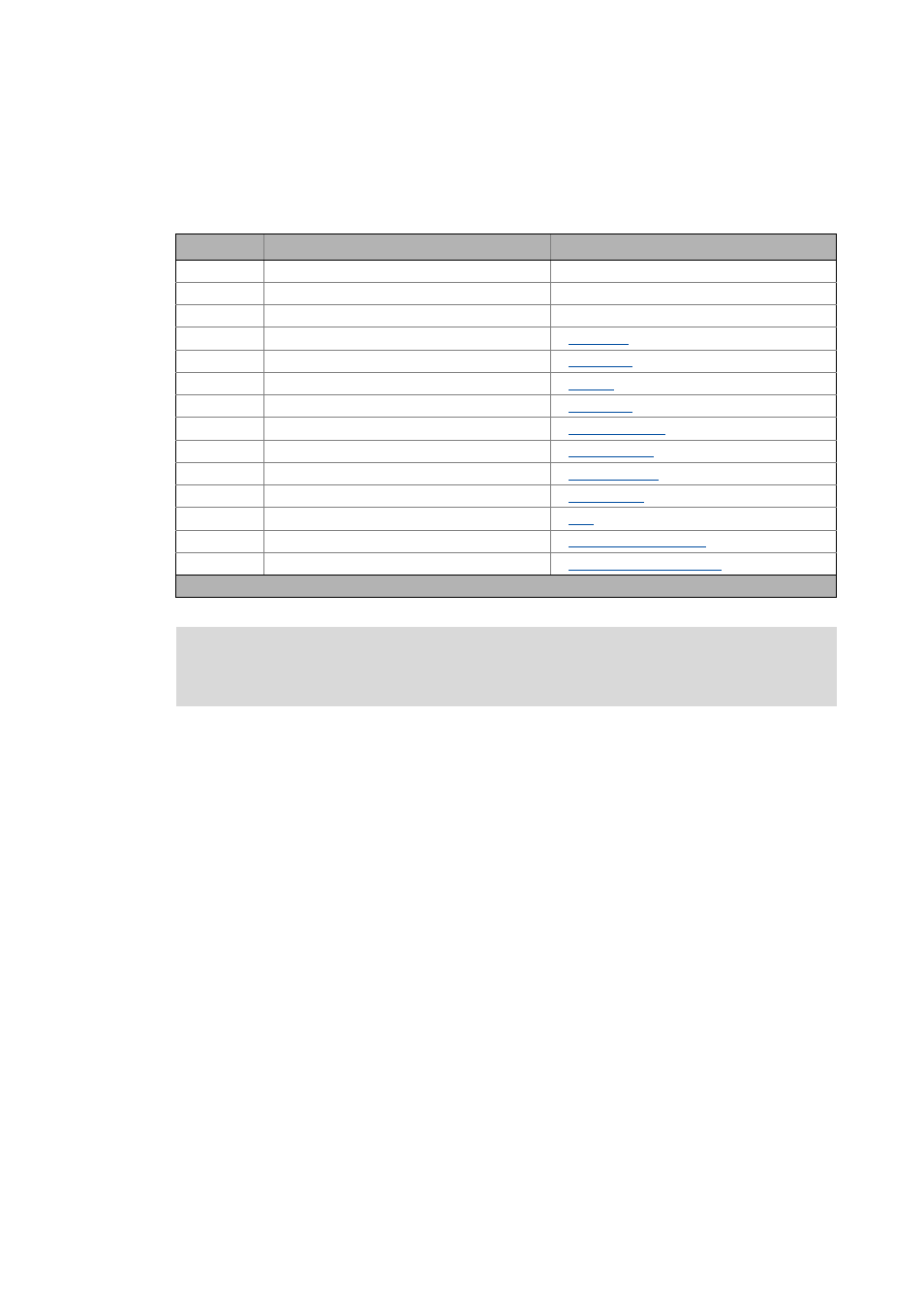
The function states are assigned to priorities so that, if several basic functions are activated at the
same time, it is always changed to the function state with the highest priority:
Priority
Function state
Executable basic function
1
Initialisation
-
2
Fault
-
3
Controller is not ready
-
4
Quick stop active
5
Manual jog active
6
Homing active
7
Positioning active
8
Setpoint follower (position) active
9
Setpoint follower (speed) active
10
Setpoint follower (torque) active
10
Brake check
12
Drive is stopped
13
Manual jog, encoderless active
Manual job, encoderless ( 407)
14
Pole position identification active
Pole position identification ( 570)
1 ≡ highest priority; 14≡ lowest priority
Note!
The basic state "Drive at standstill" is automatically adopted if no other state is active.