3 quick stop, Quick stop, Pter – Lenze 9400 User Manual
Page 388: Quick stop ( 388), 11 basic drive functions
11
Basic drive functions
11.3
Quick stop
388
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
11.3
Quick stop
In contrast to
, the purpose of quick stop (QSP) is a stop in case of error. If quick stop is activated,
the drive is brought to standstill within the deceleration time set irrespective of the setpoint that is
preselected.
Tip!
Quick stop can also be set as error response for many monitoring functions ("quick stop by
trouble"). Detailed information can be found in the chapter "
".
The source from which the quick stop was activated is shown in a bit coded manner in
.
11.3.1
Internal interfaces | "LS_Quickstop" system block"
The LS_Quickstop system block provides the internal interfaces for the basic function "Stop" in the
function block editor.
Note!
Through this, superimposed controls (e.g. synchronous or position control) may produce
following errors. If several drives execute a coordinated motion, the quick stop function
should only be used for the motion master (master drive) in order to maintain the
coordination.
When the basic function is activated, a start acceleration is considered.
acceleration/acceleration reduction when the basic function changes
Note!
Ensure that the system block is called in a cyclic application task.
Basically, projects which only contain an unsolicited task and no cyclic task are not
permissible!
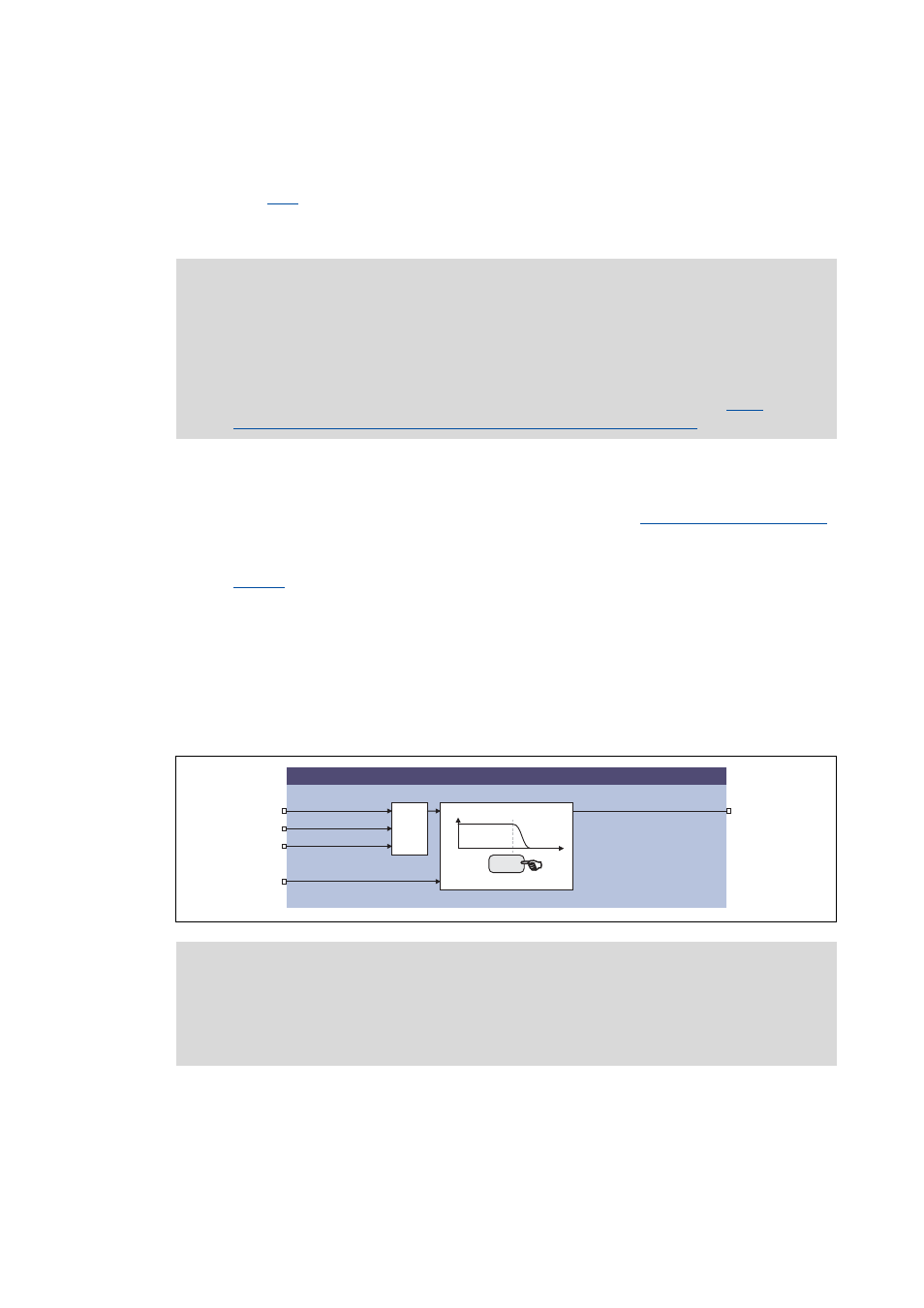
LS_Quickstop
QSP_bActivate1
QSP_bActive
STOP
n
t
³ 1
QSP_bActivate2
QSP_bActivate3
QSP_bActivateDCBrake