1 parameter setting, 11 basic drive functions, Stop – Lenze 9400 User Manual
Page 408
11
Basic drive functions
11.5
Manual job, encoderless
408
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
• Support for
in the case of torque and linear motors by means
of
• movement to a machine position in which pole position identification can be carried out in a
reproducible manner and
• setting of the pole position angle with the "PL touch probe signal"
11.5.1
Parameter setting
• Parameterising dialog box in»Engineer«: Tab Application parameters Dialog level Overview
All basic functions Manual jog (OL)
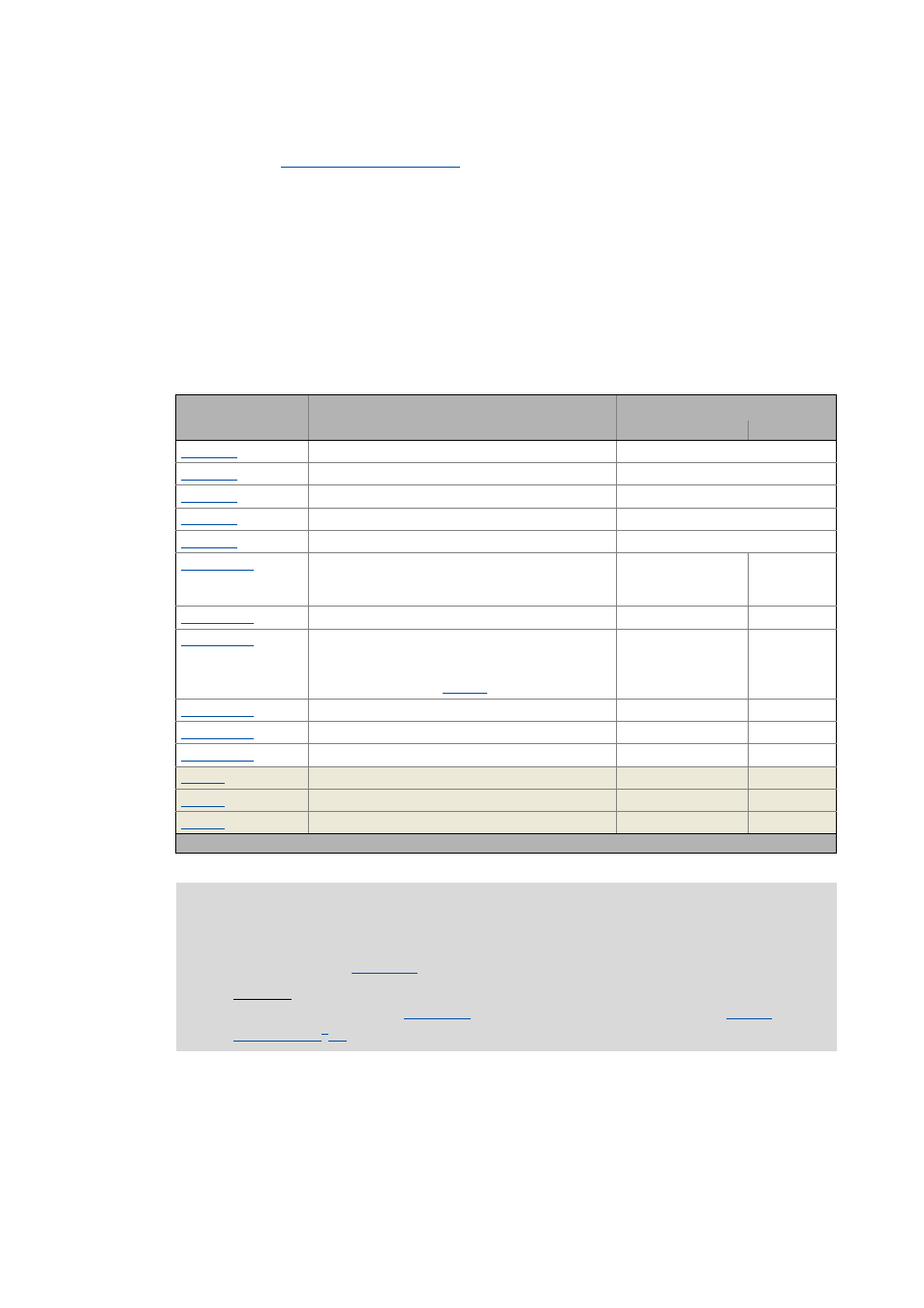
• Short overview of the parameters for manual jog, encoderless:
Parameter
Info
Lenze setting
Value Unit
EnableManualMode
0: Deactivate
JogPositive
0: Deactivate
JogNegative
0: Deactivate
ActivateDataBit1
0: Deactivate
ActivateDataBit2
0: Deactivate
Frequency
• Field frequency f
d
with which the current vector
rotates.
1.0 Hz
Start angle
0.0 °
Current
• R.m.s. value of the current vector which is injected
with the parameterised frequency/starting angle.
• 100 % ≡ I
max_device
10.00 %
Acceleration time
1.000 s
Deceleration time
1.000 s
Max. activation time
1.000 s
Mol_SetpointCurrent
- A
Mol_dnState
-
ManualJogOpenLoop: Dig. signals
-
Greyed out = display parameter
Stop!
At the frequency f
d
= 0 Hz, the r.m.s. value increases to 141 % of the current
parameterised in
. As a result, the connected motor can be destroyed!
Remedy: Activation of a derating curve in i2xt monitoring or limitation of the
parameterised current in
to 71 % of the rated motor current.