Mode 1009: ds402 homing method 09, 11 basic drive functions – Lenze 9400 User Manual
Page 451
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
451
11
Basic drive functions
11.6
Homing
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
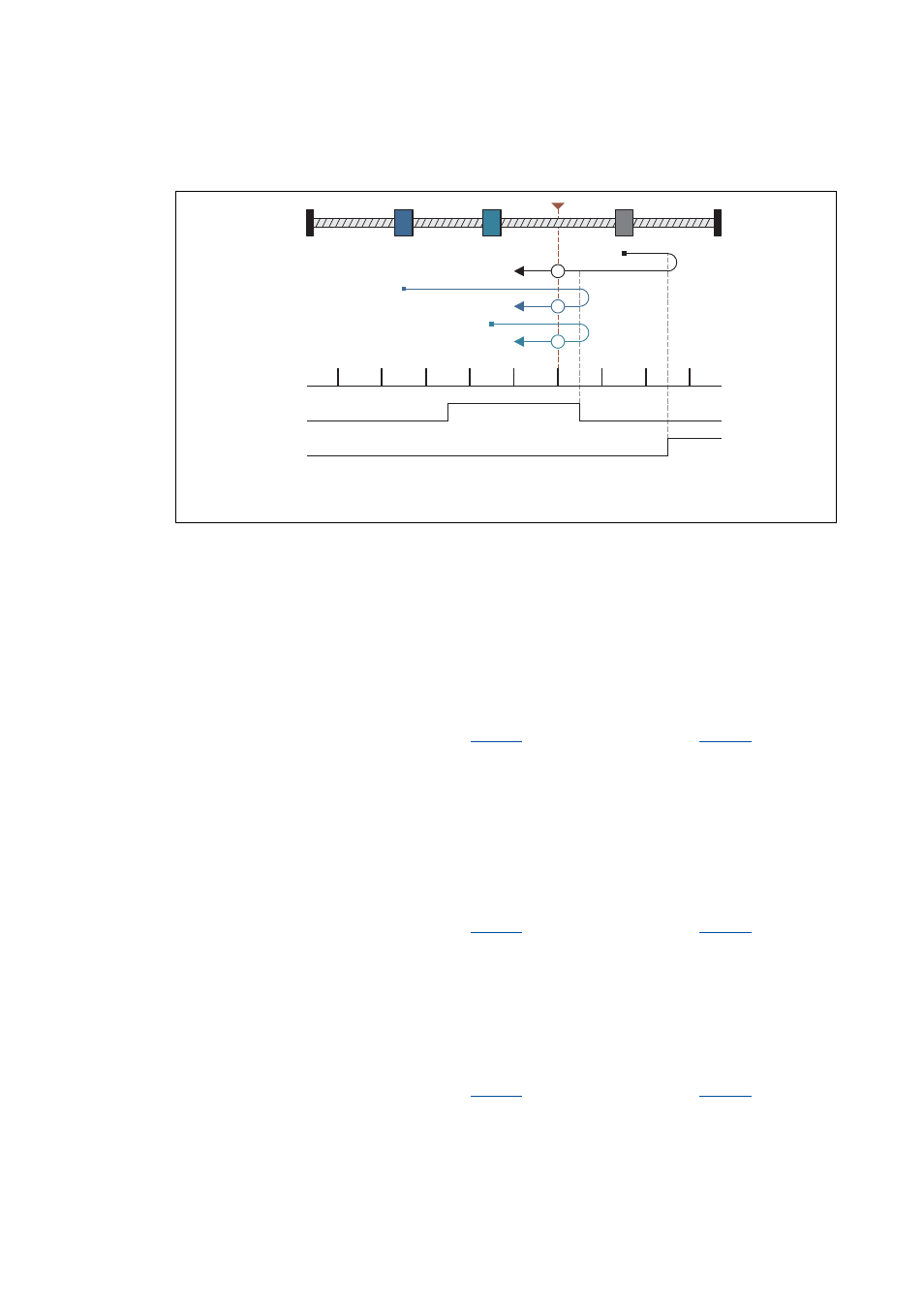
Mode 1009: DS402 homing method 09
Procedures:
Case 1:
Axis does not activate the reference switch while moving towards the limit switch:
1. Movement in positive direction with profile data set 1.
2. Reversing to positive travel range limit switch.
3. Positive edge of the reference switch activates touch probe detection and change to profile data
set 2.
4. The following positive edge of the encoder zero pulse/touch probe sensor sets the reference.
5. Absolute positioning to target position (
) with profile data set 2 (if
= "0").
Case 2:
Axis first activates the reference switch while moving towards the limit switch:
1. Movement in positive direction with profile data set 1.
2. Positive edge of the reference switch activates profile data set 2.
3. Reversing with negative edge of the reference switch.
4. Positive edge of the reference switch activates touch probe detection.
5. The following positive edge of the encoder zero pulse/touch probe sensor sets the reference.
6. Absolute positioning to target position (
) with profile data set 2 (if
= "0").
Case 3:
Axis already stands on the reference switch:
1. Movement in positive direction with profile data set 2.
2. Reversing with negative edge of the reference switch.
3. Positive edge of the reference switch activates touch probe detection.
4. The following positive edge of the encoder zero pulse/touch probe sensor sets the reference.
5. Absolute positioning to target position (
) with profile data set 2 (if
= "0").
Touch probe/zero pulse
Reference switch
Positive travel range limit switch
1
3
2
0
1
2