11 basic drive functions – Lenze 9400 User Manual
Page 533
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
533
11
Basic drive functions
11.12
Brake control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Application example:
A hoist drive is to be operated with different loads. Unfortunately we do not know when the load is
available, but the starting direction (lifting or lowering) is known.
• In a no-load condition, the hoist drive needs a torque of 10 Nm. For holding the maximum load
it needs a torque of 50 Nm.
• The change-over between lifting and lowering at start-up is done via the input
BRK_bStartingTorque2.
• To ensure the correct direction at start-up, the speed controller is loaded with the following
starting torques:
• This results in the following behaviour depending on load and direction:
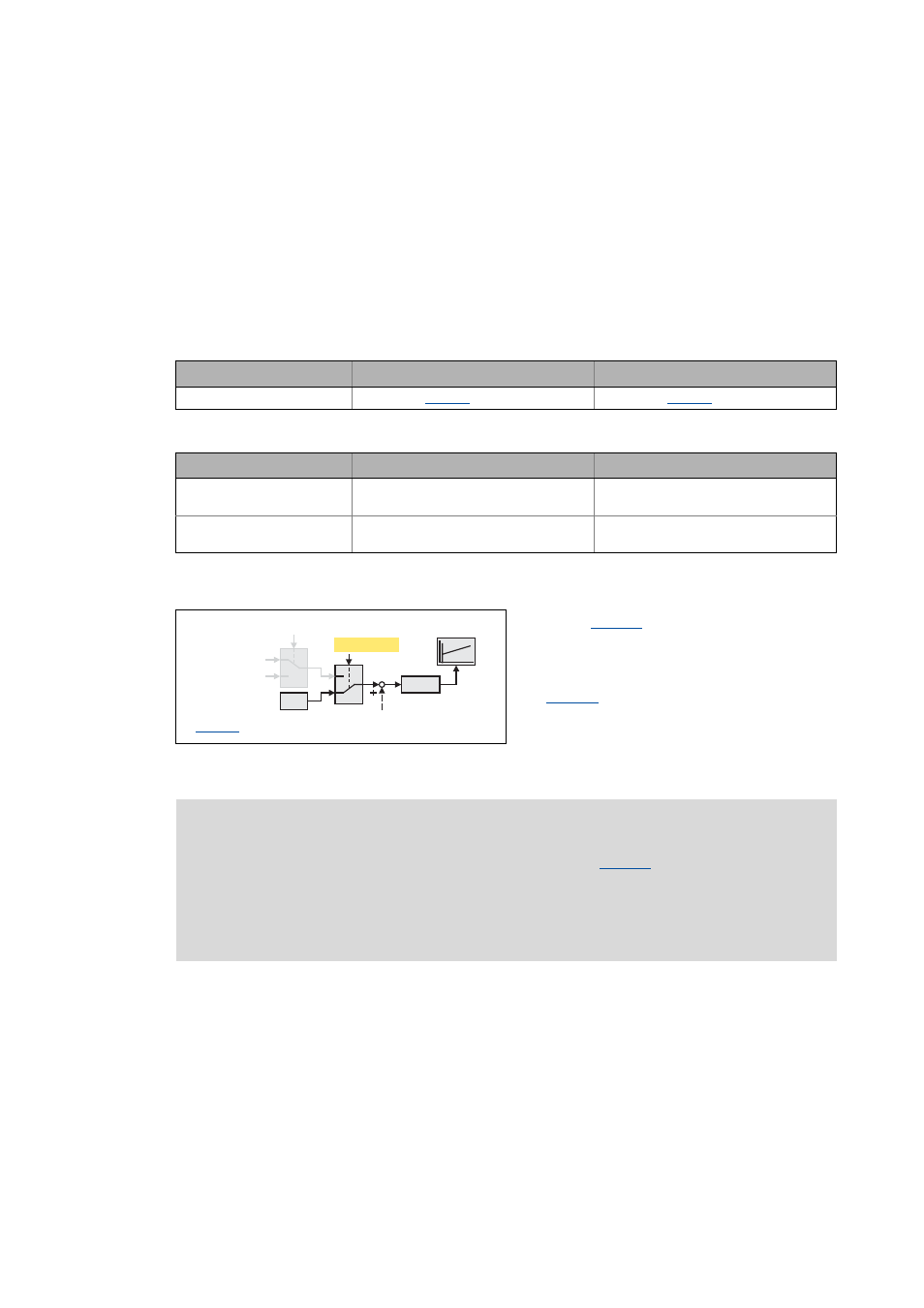
Feedforward control with memorised torque
[11-39] Feedforward control with parameterised starting torque
Lifting
Lowering
Starting torque:
= 10 Nm
Lifting
Lowering
Behaviour at max. load:
Optimum behaviour
Start-up a bit fast, but correct direction
(non-critical).
Behaviour without load:
Start-up a bit fast, but correct direction
(non-critical).
Optimum behaviour
: Source of starting torque
• When
= 1, the starting torque is
the setpoint which has been automatically
memorised during the last closing process
(falling below the speed threshold set in
1
0
1
0
C02588 = 1
S&H
CTRL
Speed controller
Note!
The greater the threshold for the brake activation set in
, the greater the dynamic
portion (e. g. the speed-dependent friction torque) in the memorised torque.
For the specific case that the load is altered while the motor holding brake is closed, a
correction value for the torque feedforward control can be defined via the input
BRK_dnTorqueAdd_n that is added to the memorised torque.