22 resolver error identification, 4drive interface – Lenze 9400 User Manual
Page 68
4
Drive interface
4.2
Device commands
68
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.22
Resolver error identification
This function extension is available from software version V7.0!
The
= "59: Resolver error identification" device command serves to detect resolver errors
which are caused when sine and cosine tracks do not magnetise orthogonally. The identified
resolver errors serve to compensate the resolver errors.
• Only possible with servo control.
Tip!
Detailed information on the resolver error compensation can be found in the chapter
"Encoder evaluation" in the subchapter "
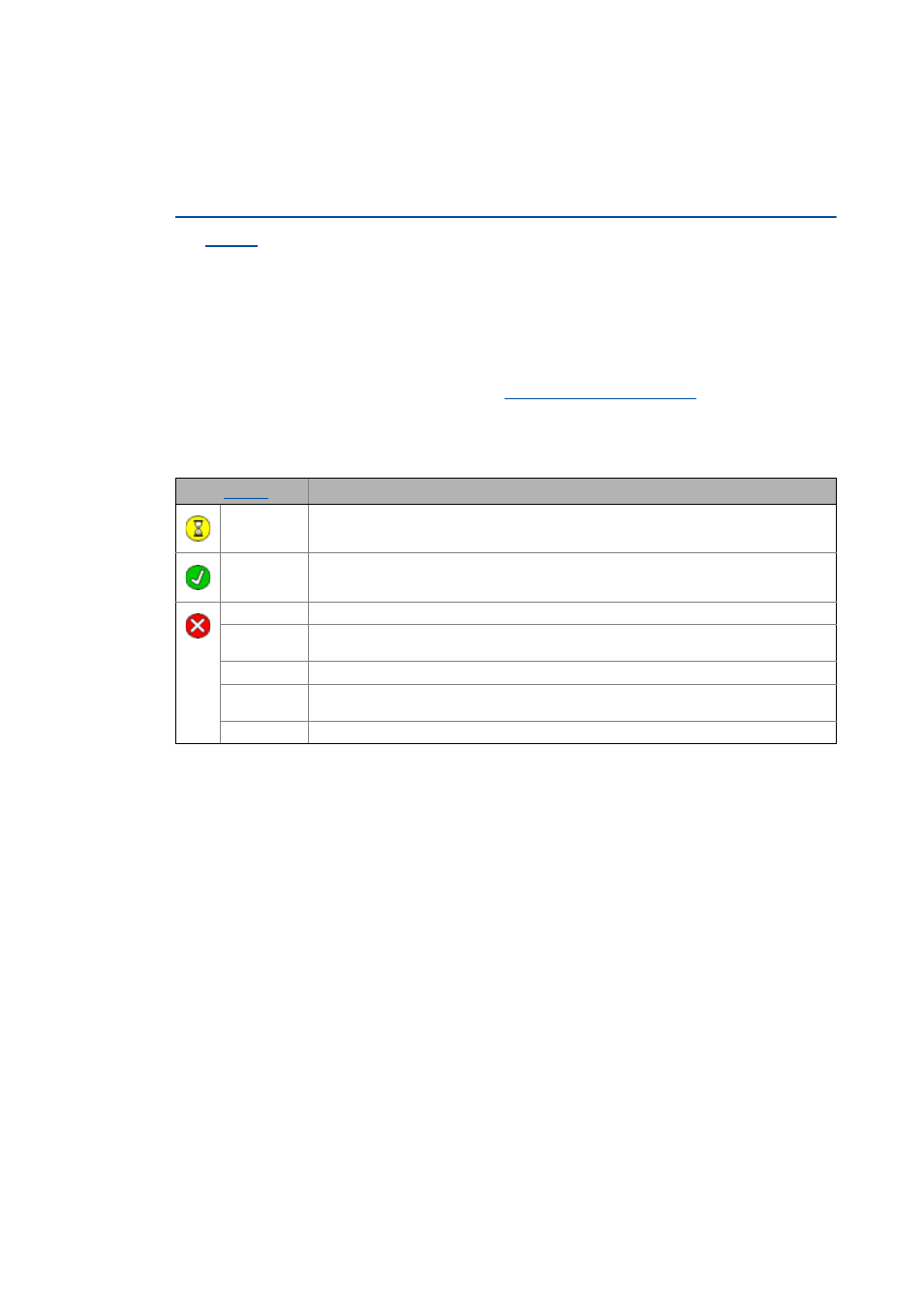
Possible status displays for this device command
Status (
Meaning
3900674 Device command in process
3866624 Device command executed successfully
3866625 General fault
3906358 Resolver error identification cannot be executed since the wrong control type is active (no
servo control).
3906359 Resolver error identification cannot be executed since an error or trouble is active.
3906360 Resolver error identification cannot be executed because another identification is already
active.
3906361 Resolver error identification cannot be executed because of too small speed (< 500 rpm).