1 optimising the control mode, Optimising the control mode, The chapter – Lenze 9400 User Manual
Page 143: 5motor interface
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
143
5
Motor interface
5.4
Servo control (SC)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.4.1
Optimising the control mode
The "optimisation steps" given in the following table serve to further optimise the control behaviour
of the servo control and adjust it to the concrete application.
• Detailed information on the individual steps can be found in the following subchapters.
Tip!
To run a typical speed profile for optimising the motor control, you can also use the basic
function "manual jog" with suitably adapted manual jog parameters if this basic function
is supported by the technology application selected.
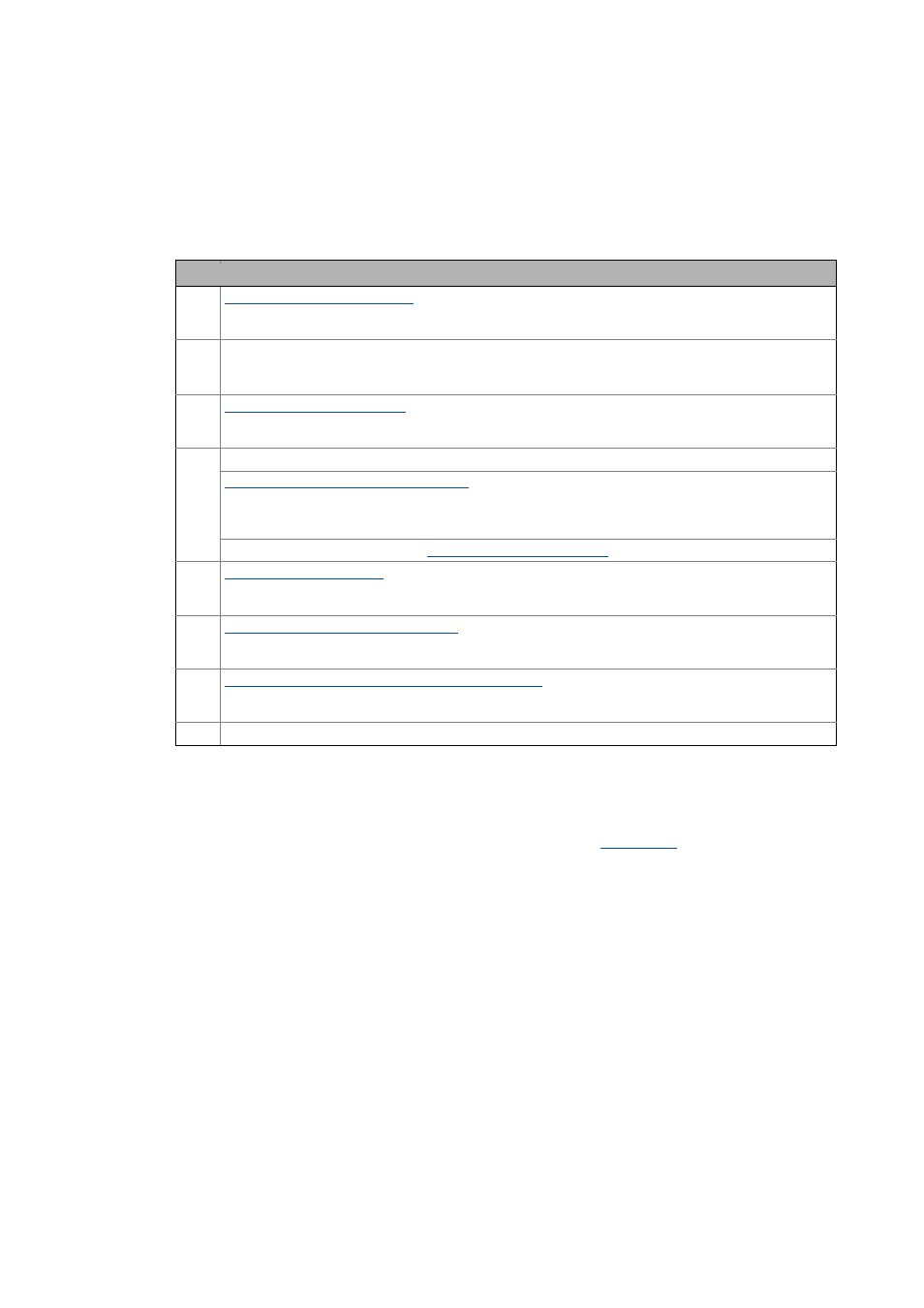
Optimisation steps
1.
Optimising the current controller
• The current controller should always be optimised if a motor of a third-party manufacturer with
unknown motor data is used!
Parameterise selected technology application in »Engineer« and load it into the controller.
• See description of the corresponding technology application.
• During operation (with setpoint selection) further steps can be carried out to optimise the motor control:
2.
Optimising the speed controller
• Via running a typical speed profile and recording the ramp response of the speed controller with the
oscilloscope.
3. If the speed controller optimisation did not achieve the intended result:
Set current setpoint filter (band-stop filter)
• In order to suppress or damp (mechanical) resonant frequencies, two current setpoint filters are
integrated in the speed control loop of the controller which are switched off in the default setting but
can be parameterised accordingly, if required.
Then readjust the speed controller:
Optimising the speed controller
4.
.
• Via running a typical speed profile and recording the ramp response of the phase controller with the
oscilloscope.
5.
Optimising response to setpoint changes
• Via running a typical speed profile and recording the inputs and outputs of the speed controller with the
oscilloscope.
6.
Setting the field weakening for asynchronous machines
• By means of traversing a speed profile 0 ↔ n
max
and recording the speed, flow, and D-current setpoints/
actual values with the oscilloscope.
7. Save »Engineer« project.