11 basic drive functions – Lenze 9400 User Manual
Page 577
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
577
11
Basic drive functions
11.14
Pole position identification
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
11.14.5
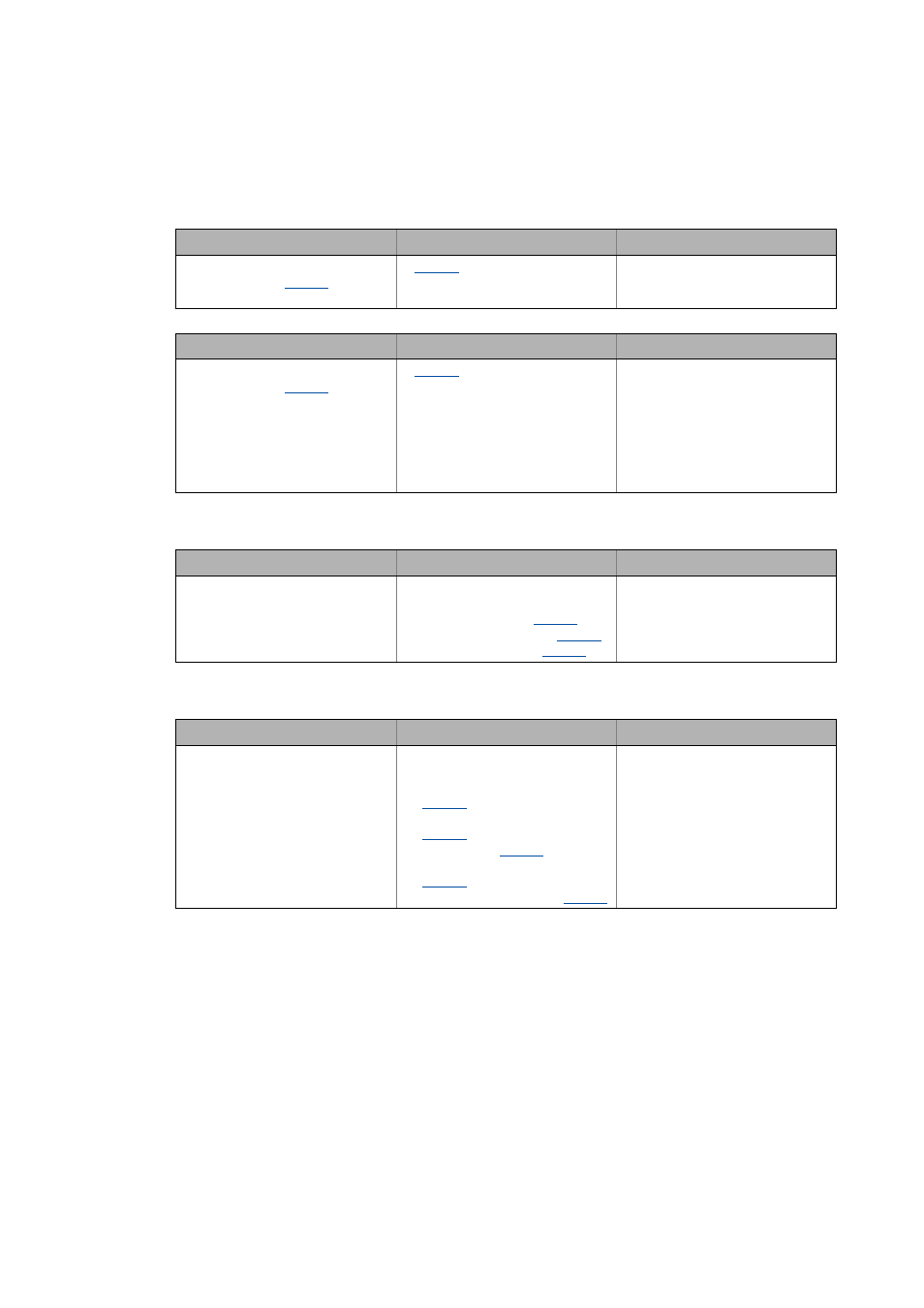
Impacts of parameter changes on the signal PPI_bPolePositionAvailable
Changing the type of motor control (C00006)
Changing relevant motor data
Changing relevant encoder data
Initial situation 1
Parameter change
Impact
• PPI_bPolePositionAvailable = TRUE
• Motor control (
) = "1: SC:
Servo control sync. motor"
another motor control is
set.
PPI_bPolePositionAvailable remains
on TRUE since the signal is irrelevant
for an asynchronous motor.
Initial situation 2
Parameter change
Impact
• PPI_bPolePositionAvailable = TRUE
• Motor control (
) =
• "2: SC: Servo control async.
motor" or
• "4: SLVC: Sensorless vector
control" or
• "6: VFCplus: V/f control" or
• "7: VFCplus: V/f control"
, the motor control "1: SC:
Servo control sync. motor" is set.
PPI_bPolePositionAvailable is reset to
FALSE since the signal is relevant for a
synchronous motor and apparently a
new motor has been selected.
Initial situation
Parameter change
Impact
PPI_bPolePositionAvailable = TRUE
One of the following parameters is
changed:
• Rated motor speed (
)
• Rated motor frequency (
• Rated motor voltage (
)
PPI_bPolePositionAvailable is reset to
FALSE since it is assumed that the
connected motor has been changed.
Initial situation
Parameter change
Impact
PPI_bPolePositionAvailable = TRUE
One of the following parameters is
changed:
• Resolver - number of pole pairs
• Encoder - number of increments
• Encoder type (
• TTL encoder signal evaluation
• Motor encoder selection (
)
PPI_bPolePositionAvailable is reset to
FALSE.