11 basic drive functions – Lenze 9400 User Manual
Page 413
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
413
11
Basic drive functions
11.5
Manual job, encoderless
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
11.5.2.5
Encoderless manual jogging in a positive/negative direction
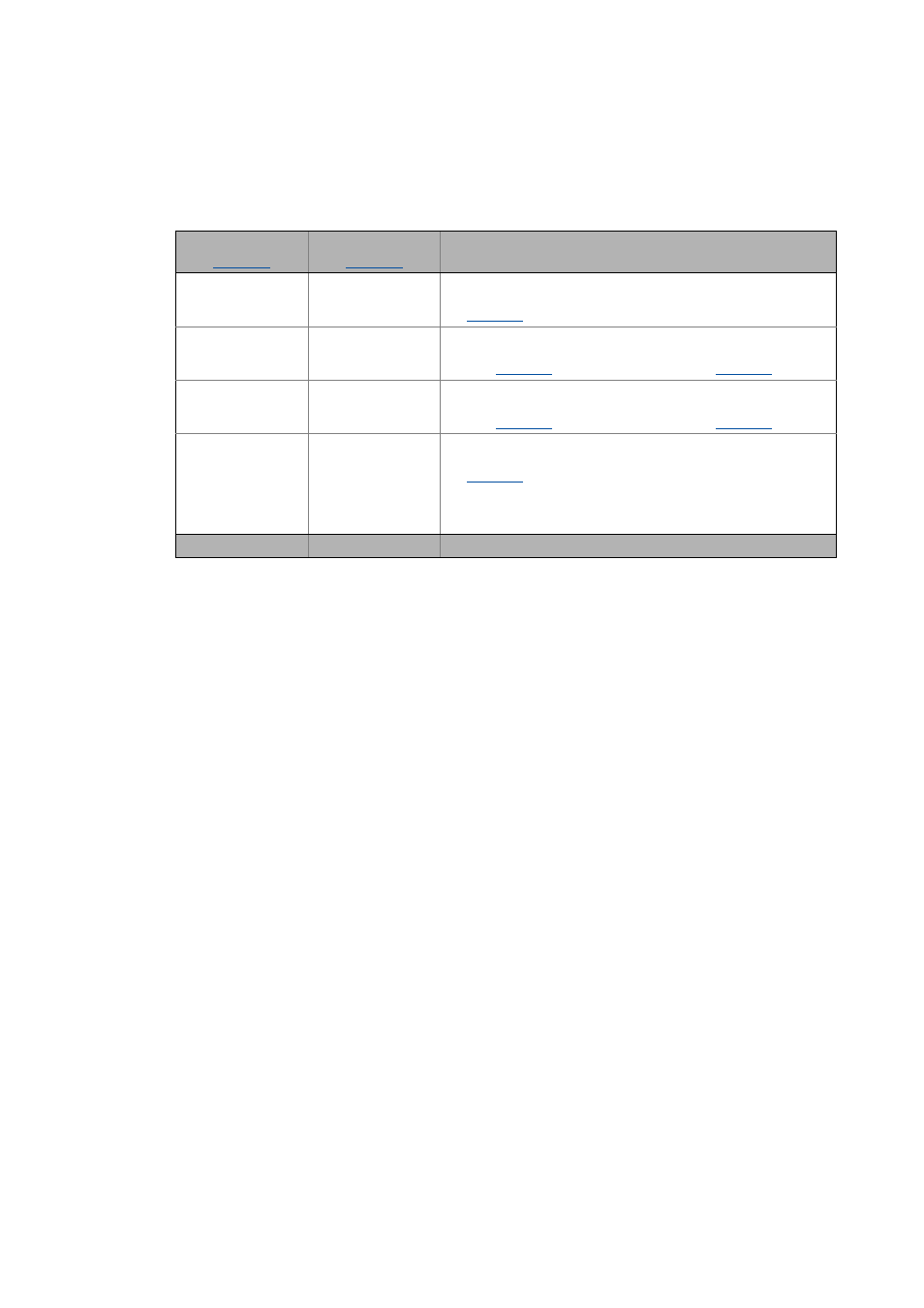
In the function state"Manual jog, encoderless active", the drive can be traversed manually in
accordance with the following truth table by means of the indicated control inputs:
MOL_bJogNegative
MOL_bJogPositive
Function
FALSE
FALSE
Stop
• The drive is braked to standstill with the deceleration time in
(
) set for the selected profile.
FALSE
TRUE
Controlled traversing in positive direction
• The drive is led to the setpoint frequency with the acceleration
) set for the selected profile (
TRUE
FALSE
Controlled traversing in negative direction
• The drive is led to the setpoint frequency with the acceleration
) set for the selected profile (
TRUE
TRUE
When both inputs are set to TRUE at the same time:
• The drive is braked to standstill with the deceleration time in
(
) set for the selected profile.
If not both inputs are set to TRUE at the same time:
• The drive continues to traverse in the direction that was selected
first.
x = number (1...4) of the selected profile parameter set