C01218 | posfollower: setting, C01219 | mck: speed follower setting, C01218 – Lenze 8400 User Manual
Page 998: C01219, 16 parameter reference
16
Parameter reference
16.2
Parameter list | C01218
998
Lenze · 8400 protec HighLine · Reference manual · DMS 3.0 EN · 03/2013 · TD05
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
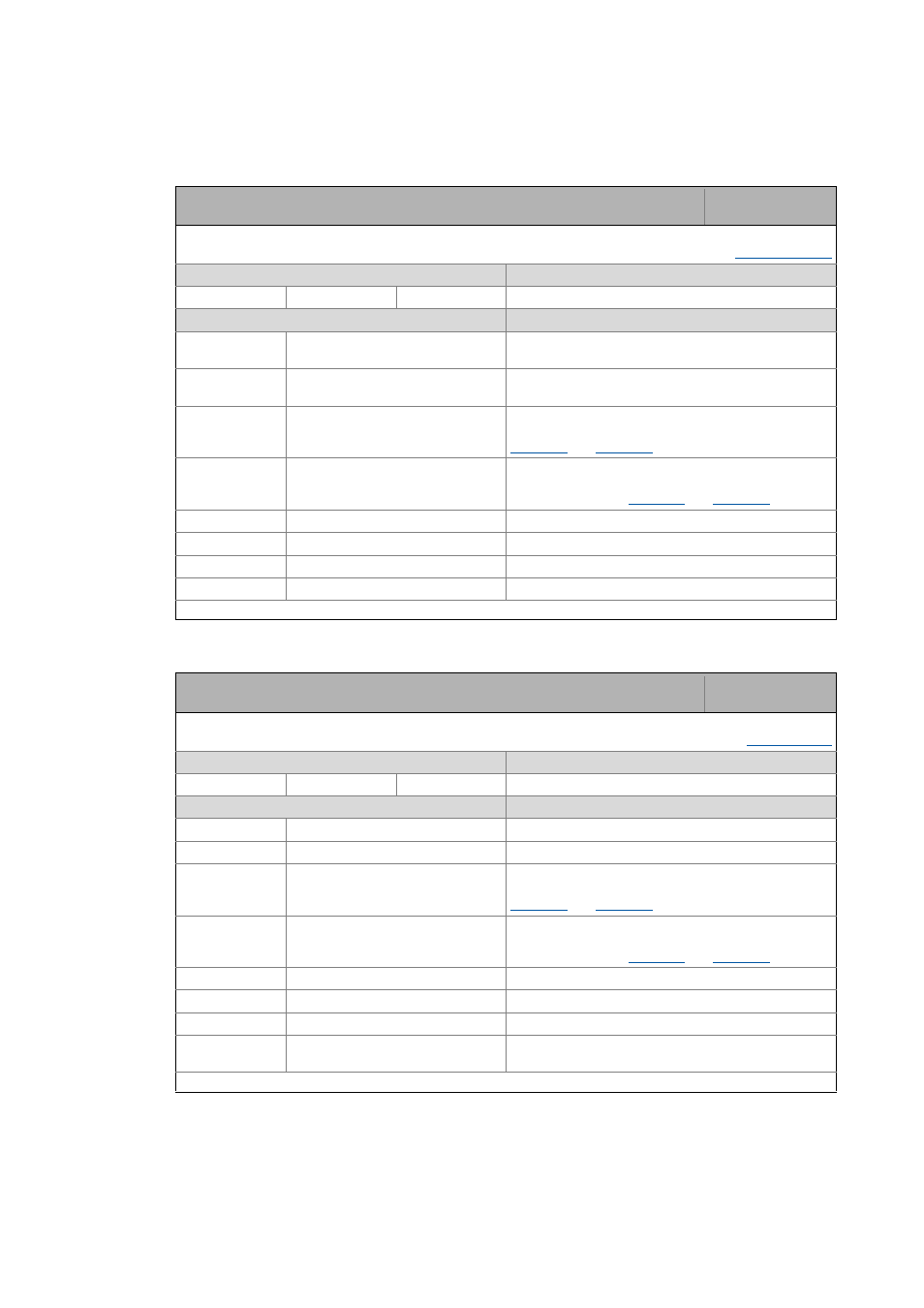
C01218
C01219
Parameter | Name:
C01218 | PosFollower: Setting
Data type: UNSIGNED_8
Index: 23357
d
= 5B3D
h
Settings for "Position follower" mode
Setting range
(min. hex value | max. hex value)
Lenze setting
0x00
0xFF 0x0C (decimal: 12)
Value is bit-coded: ( = bit set)
Info
Bit 0 Speed FF control.: nSpeedSetValue_a "1" ≡ speed feedforward control value comes from main
setpoint nSpeedSetValue_a
Bit 1 Speed FF control: nSpeedAddValue_v "1" ≡ speed feedforward control value comes from
additive speed value nSpeedAddValue_v
Bit 2 HW limit switch on
"1" ≡ Travel range monitoring via hardware limit switch
is active. The error response can be parameterised in
and
Bit 3 SW limit switch on
"1" ≡ Travel range monitoring via parameterised
software limit positions is active. The error response can
be parameterised in
and
Bit 4 Reserved
Bit 5 Reserved
Bit 6 Reserved
Bit 7 Reserved
Read access Write access CINH PLC STOP No transfer COM MOT
Parameter | Name:
C01219 | MCK: Speed follower setting
Data type: UNSIGNED_8
Index: 23356
d
= 5B3C
h
Settings for "Speed follower" mode
Setting range
(min. hex value | max. hex value)
Lenze setting
0x00
0xFF 0x0C (decimal: 12)
Value is bit-coded: ( = bit set)
Info
Bit 0 Reserved
Bit 1 Reserved
Bit 2 HW limit switch on
"1" ≡ Travel range monitoring via hardware limit switch
is active. The error response can be parameterised in
and
Bit 3 SW limit switch on
"1" ≡ Travel range monitoring via parameterised
software limit positions is active. The error response can
be parameterised in
and
Bit 4 Reserved
Bit 5 Reserved
Bit 6 Reserved
Bit 7 Position controller off
"1" ≡ Position controller is deactivated. Thus, the
compensation of the following error is switched off.
Read access Write access CINH PLC STOP No transfer COM MOT