C01238 | mck: s-ramp time follower, C01239 | setpoint holding, C01240 | mck: control word – Lenze 8400 User Manual
Page 1005: C01240, C01239, Etting rule, C01238/1, 16 parameter reference
Lenze · 8400 protec HighLine · Reference manual · DMS 3.0 EN · 03/2013 · TD05
1005
16
Parameter reference
16.2
Parameter list | C01238
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
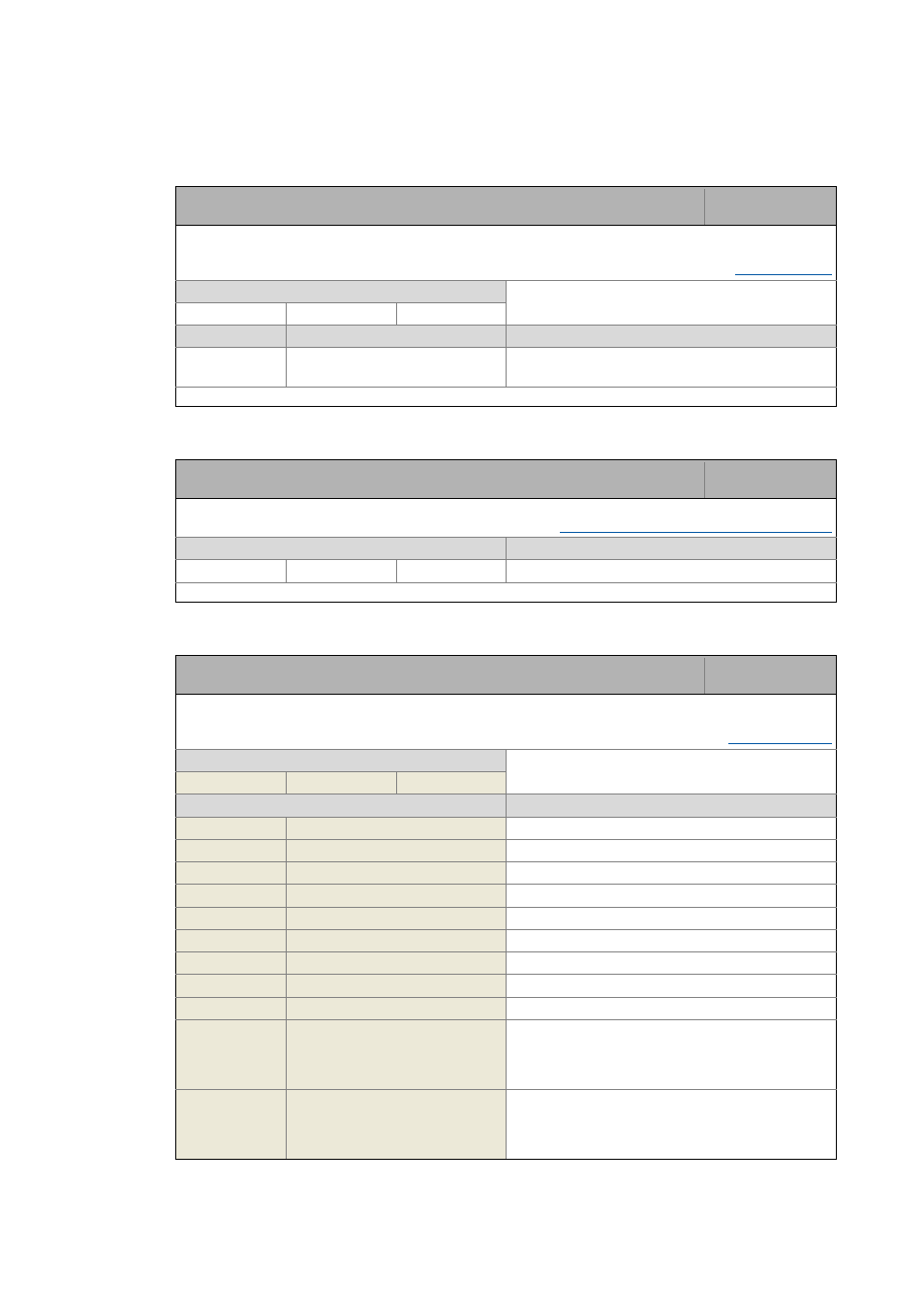
C01238
C01239
C01240
Parameter | Name:
C01238 | MCK: S-ramp time follower
Data type: UNSIGNED_16
Index: 23337
d
= 5B29
h
S-ramp times for position follower
• Setting "0 s" ≡ no rounding
Setting range
(min. value | unit | max. value)
0.000
s
10.000
Subcodes
Lenze setting
Info
C01238/1
0.000 s
Pos follower: Sync. S-ramp time
• S-ramp time for the synchronisation speed ramps.
Read access Write access CINH PLC STOP No transfer COM MOT
Scaling factor: 1000
Parameter | Name:
C01239 | Setpoint holding
Data type: UNSIGNED_32
Index: 23336
d
= 5B28
h
From version 12.00.00
Setpoint holding for bus runtime compensation
Setting range
(min. value | unit | max. value)
Lenze setting
0
ms
32 0 ms
Read access Write access CINH PLC STOP No transfer COM MOT
Scaling factor: 1
Parameter | Name:
C01240 | MCK: Control word
Data type: UNSIGNED_32
Index: 23335
d
= 5B27
h
Bit-coded status of the MCK control word
• The MCK control word is used to control the functions of the Motion Control Kernel.
Display area
(min. hex value | max. hex value)
0x00000000
0xFFFFFFFF
Value is bit-coded:
Info
Bit 0 OpMode_Bit0
Active operating mode - control bit 0
Bit 1 OpMode_Bit1
Active operating mode - control bit 1
Bit 2 OpMode_Bit2
Active operating mode - control bit 2
Bit 3 OpMode_Bit3
Active operating mode - control bit 4
Bit 4 ManJogPos
Control bit for manual jog in positive direction
Bit 5 ManJogNeg
Control bit for manual jog in negative direction
Bit 6 ManExecute2ndSpeed
Control bit for activation of second manual speed
Bit 7 ReleaseLimitSwitch
Control bit for retracting the hardware limit positions
Bit 8 HomStartStop
Control bit for start/stop homing
Bit 9 HomSetPos
Control bit for setting of home position
• "0->1" ≡ sets position setpoint and actual position
value to the home position at the MCK.
• This function is independent of the operating modes.
Bit 10 HomResetPos
Control bit for reset of home position
• "0->1" ≡ resets the information bit for the status
"Home position known" (home position not known).
• The position displays are not influenced by this.