5motor control (mctrl) – Lenze 8400 User Manual
Page 251
Lenze · 8400 protec HighLine · Reference manual · DMS 3.0 EN · 03/2013 · TD05
251
5
Motor control (MCTRL)
5.10
Parameterisable additional functions
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
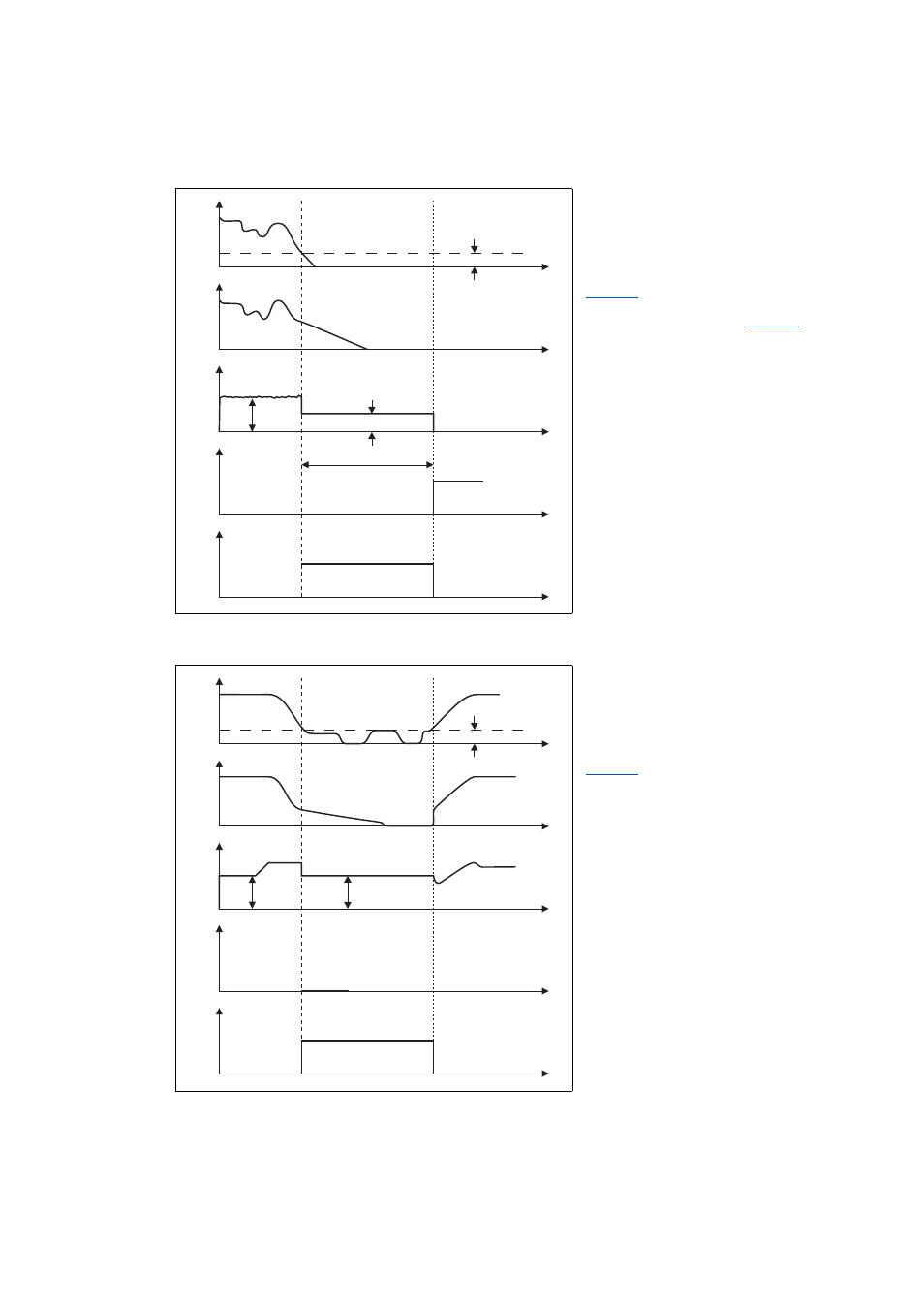
Explanation of the automatic DC-injection braking function by means of two examples
[5-27] Example 1: Signal characteristic for automatic DC-injection braking of a drive without speed feedback
[5-28] Example 2: Signal characteristic for automatic DC-injection braking of a drive with speed feedback
The motor rotates at a specified
speed. The current adjusts itself to
the load, see .
The DC braking current set in
is injected.
After the hold time (
) has
expired, a pulse inhibit is set.
Speed setpoint
Actual speed value of the motor
Output current of the controller
Pulse inhibit
DC-injection braking is active
0
1
2
3
4
C0107
C00036
C00019
The motor rotates at the selected
speed. The resulting current depends
on the load, see .
The DC braking current set in
is injected.
The actual speed value of the
motor follows the speed setpoint.
The resulting current depends on the
load.
Speed setpoint
Actual speed value of the motor
Output current of the controller
Pulse inhibit
DC-injection braking is active
0
1
2
3
4
C00036
C00019