11 encoder/feedback system, Encoder/feedback system, Available – Lenze 8400 User Manual
Page 257: Encoder/feedback system ( 257), 5motor control (mctrl), Danger
Lenze · 8400 protec HighLine · Reference manual · DMS 3.0 EN · 03/2013 · TD05
257
5
Motor control (MCTRL)
5.11
Encoder/feedback system
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.11
Encoder/feedback system
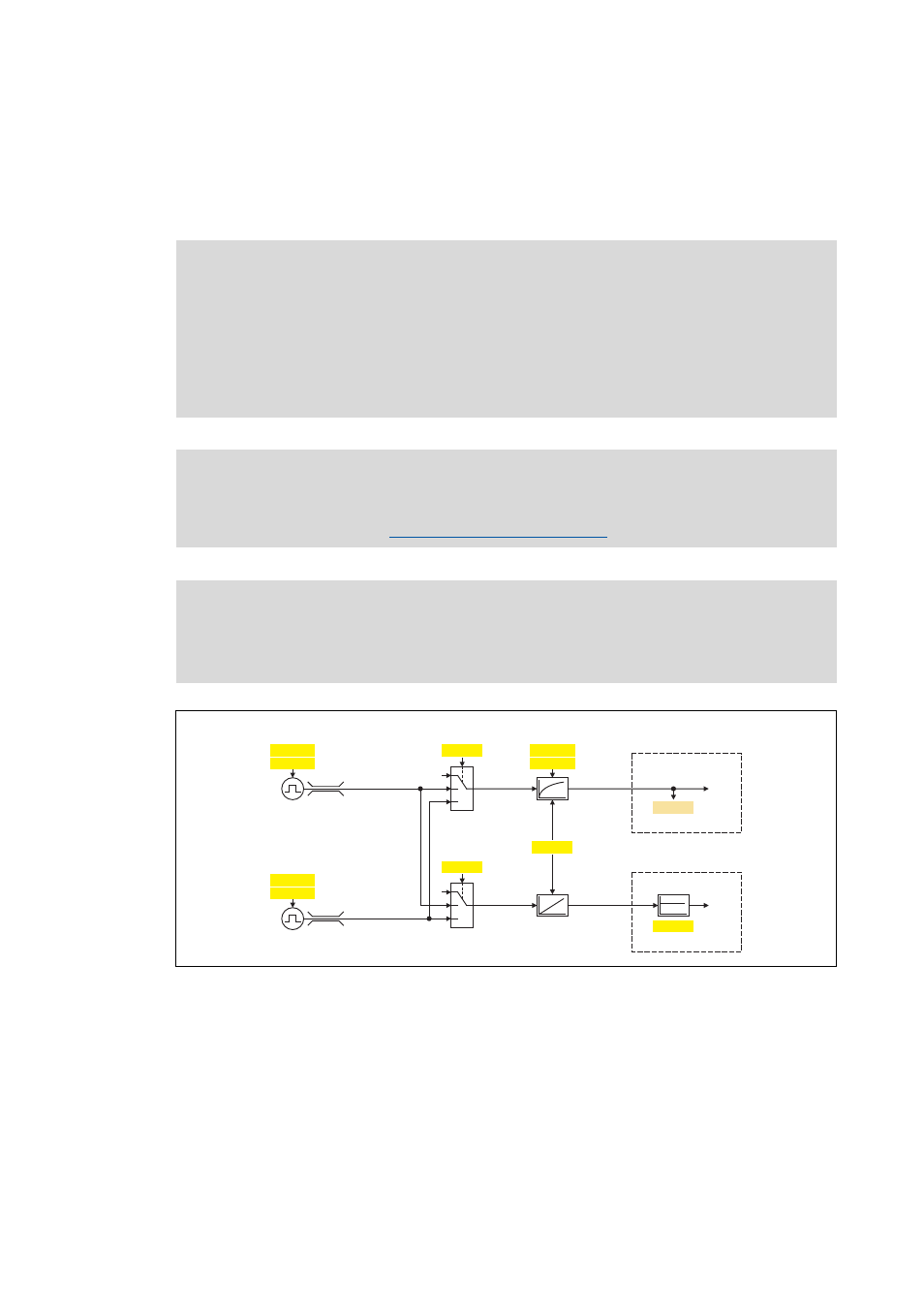
For the motor controls with speed monitoring the feedback signal can be supplied via an HTL
encoder at the digital input terminals (DI1/DI2 or DI5/DI6).
[5-29] Signal flow - encoder interface
Danger!
• To avoid interference when using an encoder, only use shielded motor and encoder
cables.
• If an HTL encoder is used at the digital input terminals:
Observe the maximum input frequencies of the digital inputs!
• DI1/DI2: max. 100 kHz
• DI5/DI6: max. 10 kHz
Note!
In the Lenze setting (e.g. when the device is delivered), the open-circuit monitoring of the
encoder is activated.
Encoder open-circuit monitoring
Wiring diagram, assignment and electrical data of the digital input terminals can be
found in the 8400 protec hardware manual in the chapter "Technical data".
• The hardware manual has been stored in electronic form on the data carrier supplied
with the 8400 drive controller.
1
0
2
C00495
FreqIn12
C00497/1
C00497/2
1
0
2
C00490
FreqIn56
C00051
C00254
C00420/1
C00425/1
C00420/2
C00425/2
100 kHz
10 kHz
C00496
Speed encoder
selection
Filter time
FreqIn12
FreqIn56
Encoder number of incr.
Actual speed value
Speed controller/
slip regulator
Position encoder
selection
Position controller
Kp position controller
Encoder sampling time
Encoder number of incr.
Encoder sampling time
Encoder evaluation procedure