5 positioning (relative or absolute), Positioning (relative or absolute), 3commissioning – Lenze 8400 User Manual
Page 93
Lenze · 8400 protec HighLine · Reference manual · DMS 3.0 EN · 03/2013 · TD05
93
3
Commissioning
3.10
PC manual control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
3.10.5
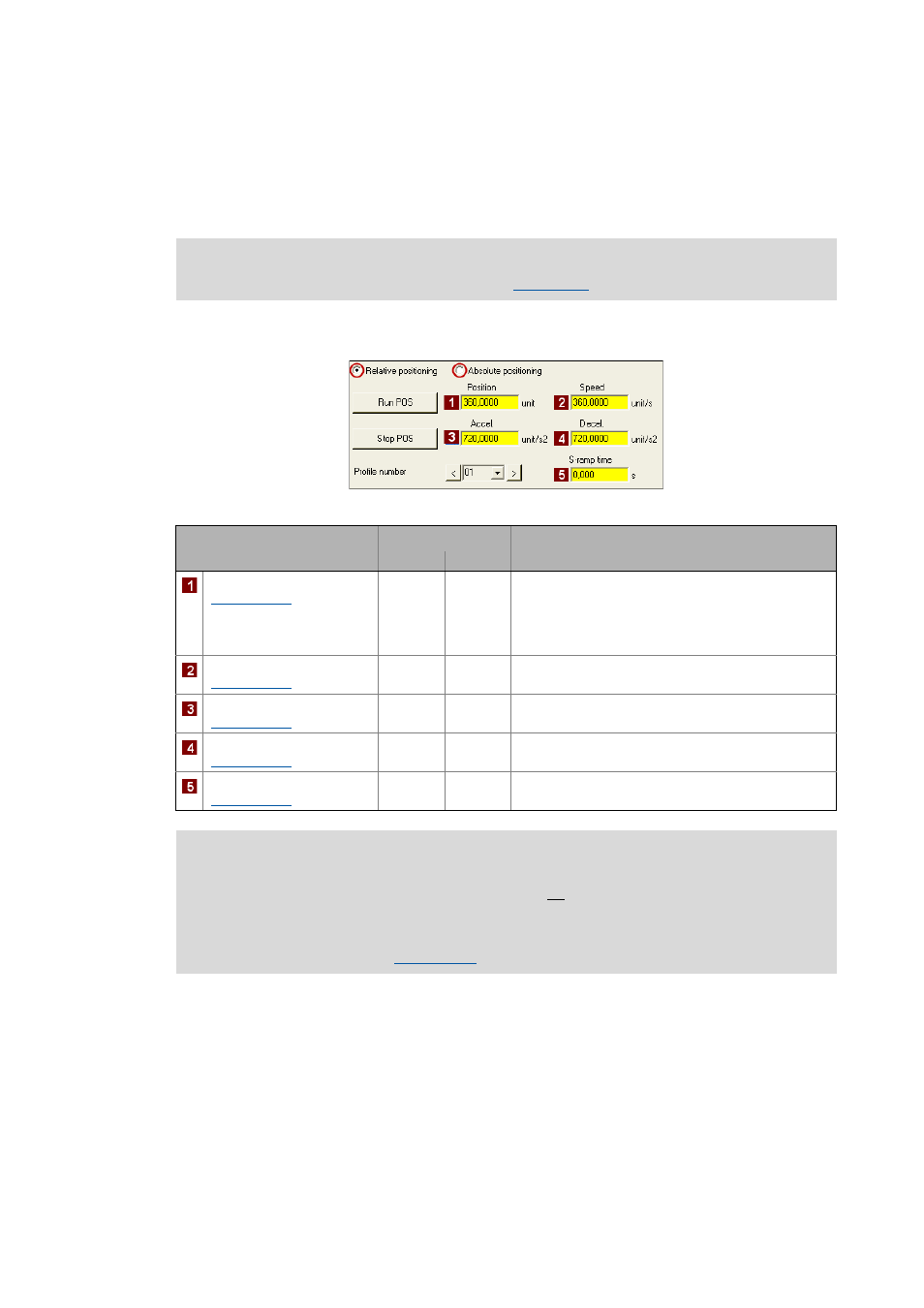
Positioning (relative or absolute)
Positioning means that a workpiece/tool or material is moved from a starting position to a defined
destination.
The change to the "Positioning" operating mode and the simultaneous selection of the positioning
mode (relative or absolute) is made by selecting the corresponding option on the Positioning tab:
• The profile parameters saved in the parameter set for the basic "Positioning" function are used:
You can find detailed information on the "Positioning" mode in the chapter entitled
"Basic drive functions" in the subchapter "
Parameter
Lenze setting
Info
Value Unit
Position
(
)
360.0000 units
Target position or distance to be traversed.
• When "Relative positioning" has been selected:
Distance to starting position (current position).
• When "Absolute positioning" has been selected:
Distance to defined zero position.
Speed
(
)
360.0000 units/s
Maximum speed at which the target is to be
approached.
Acceleration
(
)
720.0000 units/s
2
Stipulation of the change in speed at which maximum
acceleration is to take place.
Delay
(
)
720.0000 units/s
2
Stipulation of the change in speed at which maximum
deceleration to a standstill is to take place.
S-ramp time
(
)
0.000 s
By defining an S-ramp time, a profile is travelled with S-
shaped ramps.
Note!
In order that no complex travel motions occur, no forwarding to following profile set in
the profile data takes place with PC manual control!
You can find detailed information on entering profiles in the chapter entitled "Basic drive
functions", subchapter "
".