8basic drive functions (mck) – Lenze 8400 User Manual
Page 518
8
Basic drive functions (MCK)
8.8
Positioning
518
Lenze · 8400 protec HighLine · Reference manual · DMS 3.0 EN · 03/2013 · TD05
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
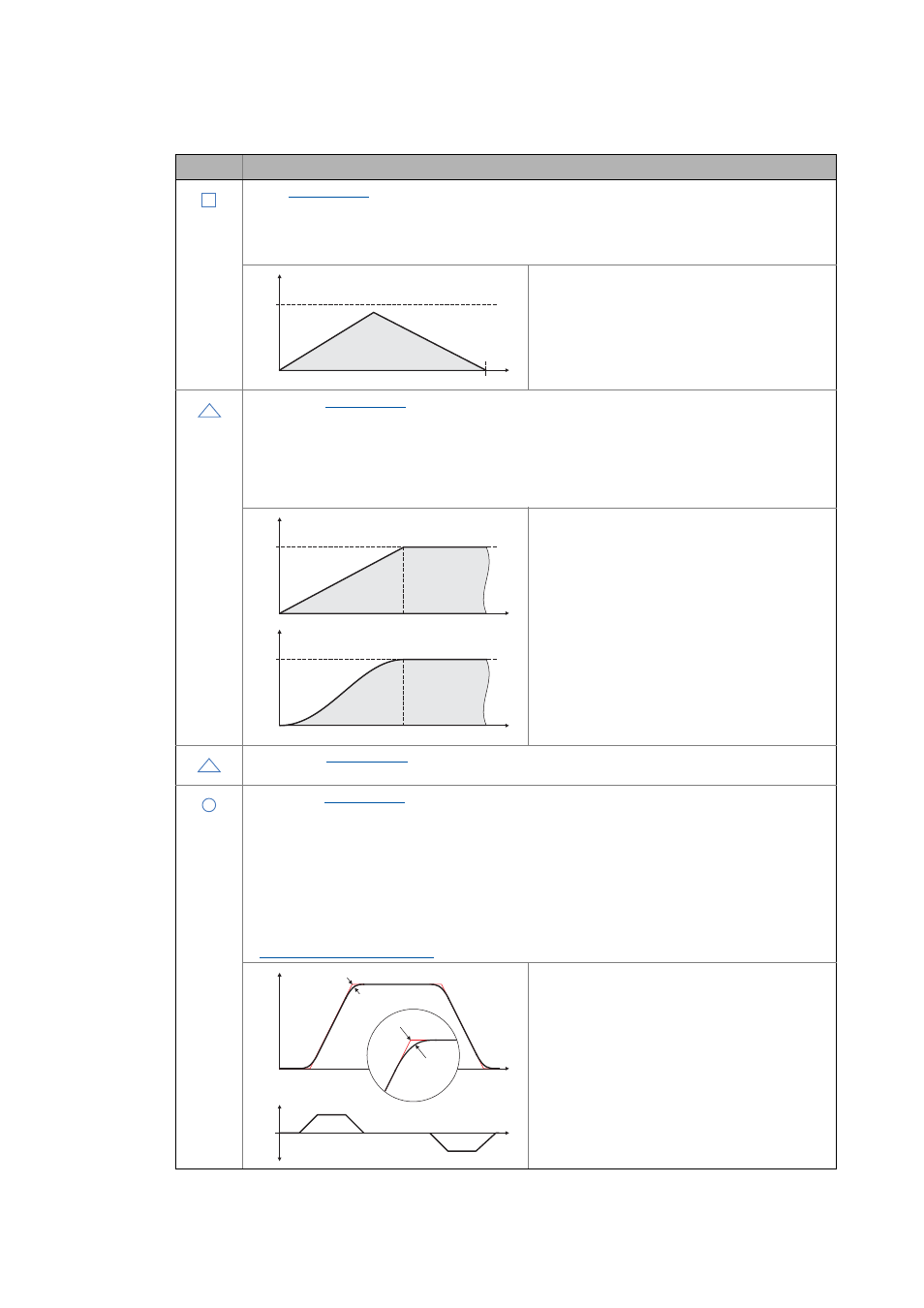
Speed (
)
Maximum speed at which the target is to be approached.
• Depending on the profile parameters of position, acceleration and deceleration , it is possible that
the drive will not even reach the maximum speed. In this case, the graphic representation will be a
trapezium instead of a triangle:
Acceleration
Travelling speed (is not reached in this case)
Deceleration
Target position (or traversing distance)
Acceleration (
Stipulation of the change in speed at which maximum acceleration is to take place.
• Two types of acceleration are distinguished:
• Constant acceleration: the speed increases linearly.
• Linearly increasing acceleration: Speed increases in S-shape.
A linearly increasing acceleration (S-profile) results from the setting of an S-ramp time (see more
below).
Constant acceleration (L-profile)
Linearly increasing acceleration (S-profile)
Deceleration (
Stipulation of the change in speed at which maximum deceleration to a standstill is to take place.
S-ramp time (
)
Due to stipulation of an S-ramp time for a profile, the profile is executed with S-shaped ramps, i.e.
acceleration and braking processes are initiated smoothly in order to reduce jerk and thus the stress on
the drive components.
• The acceleration/deceleration stipulated in the profile is not achieved until after the specified S-
ramp time.
• This kind of acceleration/deceleration is needed for sensitive machine parts with a certain amount
of play.
• The unavoidable consequence of the slower increase in acceleration in the case of the S profile is that
the positioning time is longer compared to the L profile, which is more efficient in terms of time.
S-ramp time for jerk limitation ( 522)
Without jerk limitation (L profile)
With jerk limitation (S profile)
Icon
Profile parameter
B
v
pos
v [m/s]
t [s]
C
v
pos
v
pos
v [m/s]
v [m/s]
t [s]
t [s]
D
E
a
v [m/s]
t [s]
t [s]