9diagnostics & error management – Lenze 8400 User Manual
Page 578
9
Diagnostics & error management
9.8
Maloperation of the drive
578
Lenze · 8400 protec HighLine · Reference manual · DMS 3.0 EN · 03/2013 · TD05
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
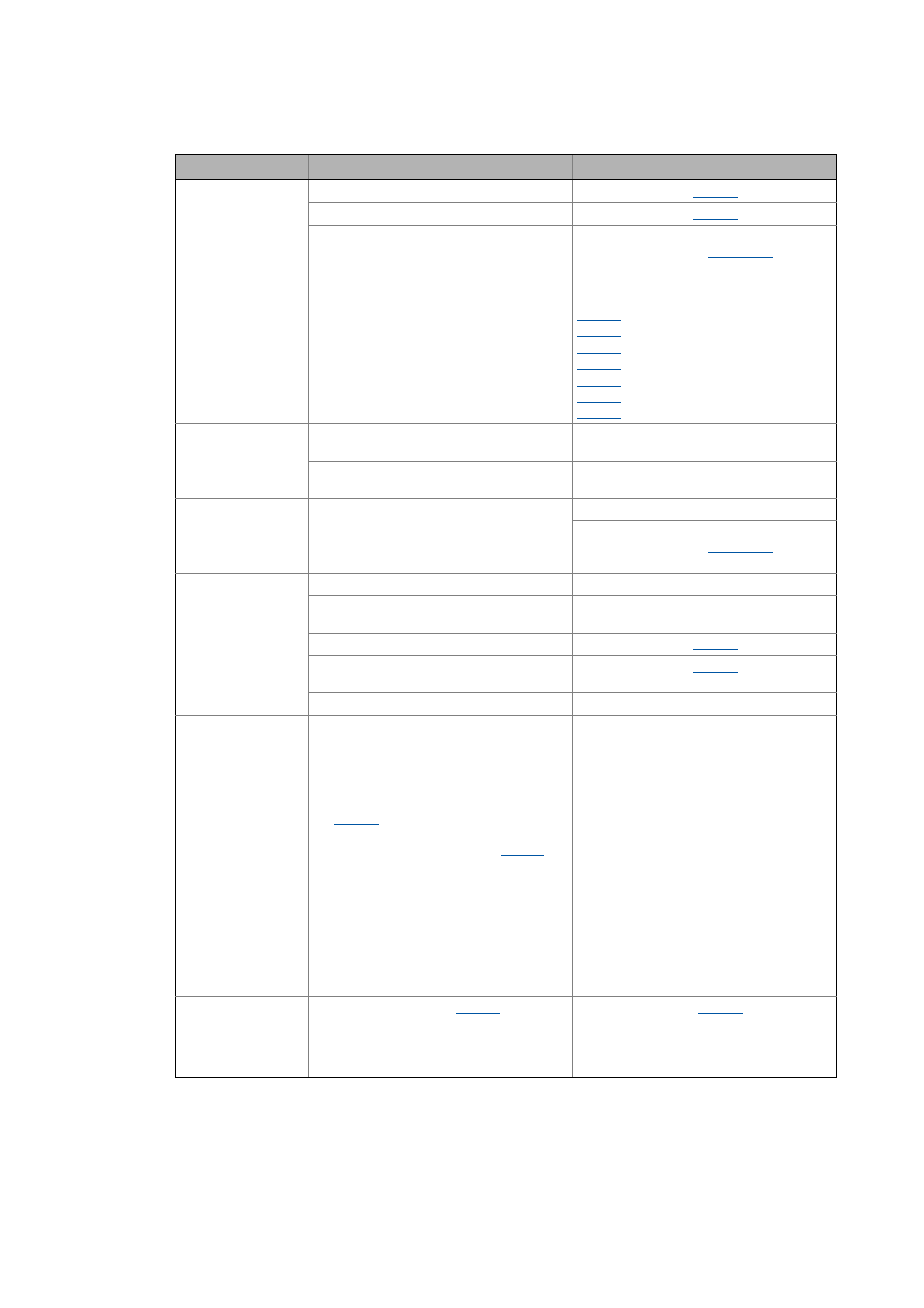
Motor consumes too
much current
V
min
boost has been selected too high
V/f base frequency has been selected too low Correct setting with
Rated motor data (stator resistance, speed,
current, frequency, voltage) and cos ϕ
and/or magnetising inductance is not
adapted to the motor data
Execute automatic motor parameter
identification with the
device
command
- or -
Adjust motor parameters manually:
: Motor stator resistance
: Rated motor speed
: Rated motor current
: Rated motor frequency
: Rated motor voltage
: Motor cosine phi
: Motor magnetising inductance
Motor parameter
identification is
aborted with error
LP1
Motor is too small compared to the rated
device power (>1 : 3)
Use device with lower rated power
DC injection brake (DCB) is active via
terminal
Deactivate DC injection brake
Drive behaviour with
vector control is not
satisfactory
different
Optimise or manually adapt vector control
Execute automatic motor parameter
identification with the
device
command
Torque dip in field
weakening range
or
motor stalling when
being operated in the
field weakening
range
Motor is overloaded
Check motor load
Motor windings are wired incorrectly
Reverse from star connection to delta
connection
V/f reference point is set too high
Override point of field weakening is set too
low
Mains voltage too low
Increase mains voltage
An asynchronous
motor with feedback
rotates without
control and with too
low speed
Motor phases have been interchanged
• Thus the rotating field of the motor is not
identical anymore with the rotating field
of the feedback system.
• Therefore, the drive shows the following
behaviour if V/f characteristic control
= 7) is performed:
• The motor rotates faster than the speed
setpoint by the value set in
.
• After the controller has been enabled,
the controller will not stop if the speed
setpoint = 0 or a quick stop (QSP)
occurs.
• Among other things, the final motor
current depends on the value set for the
V
min
boost and may rise up to I
max
which can trigger the "OC5: Ixt
overload" fault message.
Check the phase position of the motor cable
If possible: Actuate the motor with
deactivated feedback (
= 6) and check
direction of rotation of the motor
Motor phase (LP1)
monitoring does not
respond if the motor
phases are
interrupted
Monitoring is not active (
= 0)
Activate monitoring (
= 1)
Maloperation
Cause
Remedy