18 function library – Lenze 8400 User Manual
Page 1261
Lenze · 8400 protec HighLine · Reference manual · DMS 3.0 EN · 03/2013 · TD05
1261
18
Function library
18.1
Function blocks | L_DFRFG_1
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
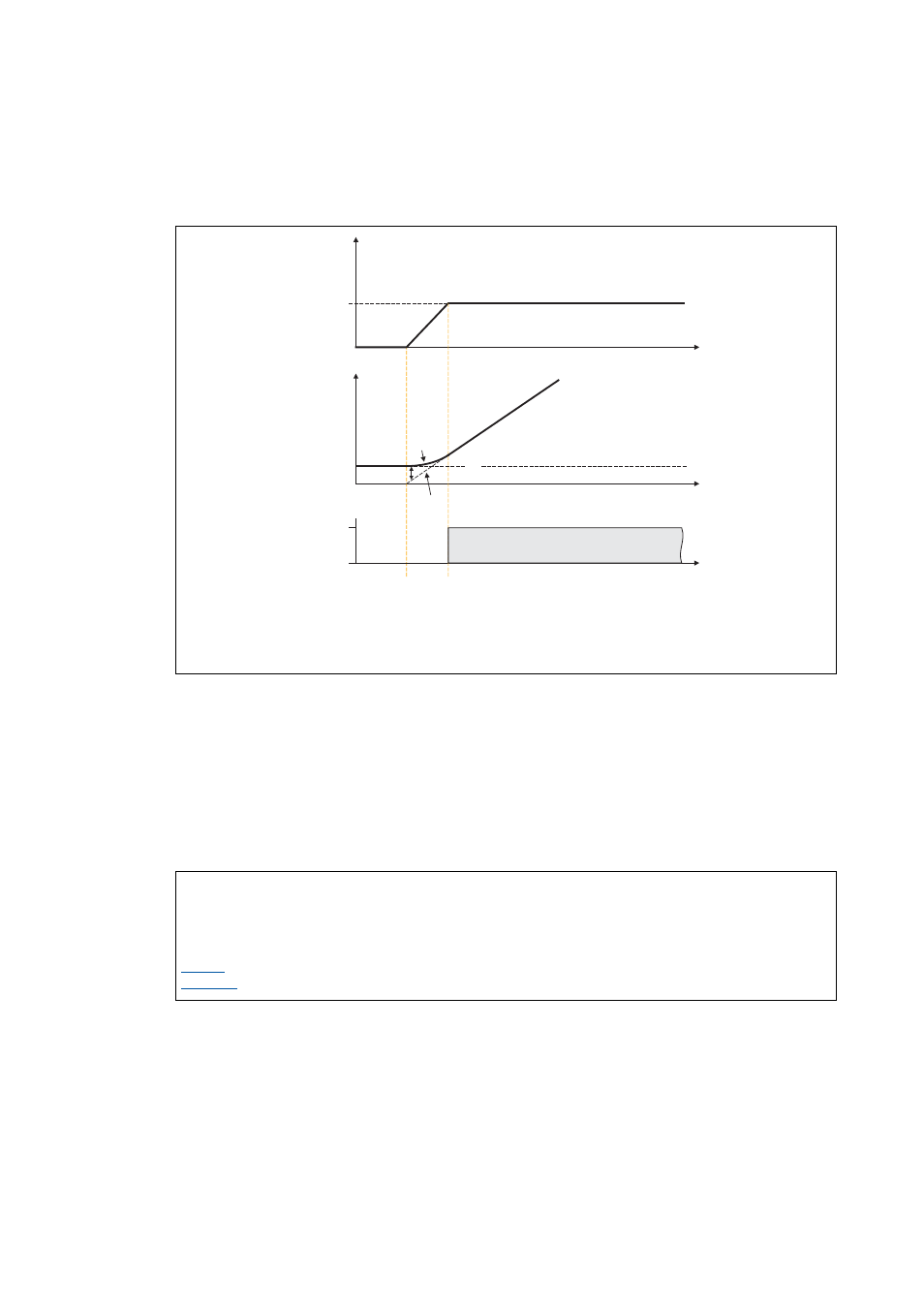
Behaviour with offset
By selecting an offset, the actual position is preloaded with a non-zero value. This reduces the
distance and the time to synchronicity.
[18-33] Example 1: With offset selection
• When a positive offset is selected, the sign of the distance between setpoint and actual value
changes. This distance is reduced due to the acceleration of the slave from the input of the touch
probe pulse. Thus, the time to synchronicity is shorter.
• The offset refers to the master value selection and is scaled with an encoder revolution
(≡ 65536 increments).
• The offset can be determined empirically, but it is sensible to calculate the required acceleration
distance and select this value as offset:
Difference between setpoint angle and actual angle (ϕ
DIFF
)
Offset [inc]
t
0
= touch probe event
t
1
= synchronicity achieved
j
t
TRUE
FALSE
bSync
t
v
nIn_v
t
j
SET
j
ACT
t
0
t
1
ϕ
ACC
= acceleration distance in [increments]
v
SET
= setpoint speed in [rpm]
= reference speed of the motor in [rpm]
= acceleration/deceleration time of the ramp generator in [ms]
ϕ
ACC
1
2
---
V
SET
(
)
2
C00011 [rpm]
-----------------------------------
C01076/1 [ms] 16384 [incr./ms]
15000 [rpm]
-------------------------------------------
⋅
⋅
⋅
=