7 s-shaped ramp, 8 additional setpoint, 7 s-shaped ramp 1 – Lenze 8400 User Manual
Page 1341: 8 additional setpoint 1, 18 function library
Lenze · 8400 protec HighLine · Reference manual · DMS 3.0 EN · 03/2013 · TD05
1341
18
Function library
18.1
Function blocks | L_NSet_1
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
18.1.117.7 S-shaped ramp
A PT1 element is connected downstream of the linear ramp function generator. This arrangement
implements an S-shaped ramp for a nearly jerk-free acceleration and deceleration.
• The PT1 element can be switched on/off via the bSShapeActive input.
• The corresponding S-ramp time can be set under
.
18.1.117.8 Additional setpoint
Use the nNAdd_a input to define an additional value (e.g. a correcting signal) and combine it
arithmetically with the main setpoint nNSet_a.
• First, the additional setpoint is led via a ramp function generator with linear characteristic. Its Ti
times can be set in
(acceleration time) and
(deceleration time).
• When the input bNAddInv is set to TRUE, the additional setpoint can be inverted before having
an effect on the ramp function generator.
• When the input bLoad is set to TRUE, the ramp function generator is set to zero for the
additional setpoint and held there without considering the Ti times. The same applies when the
controller is inhibited.
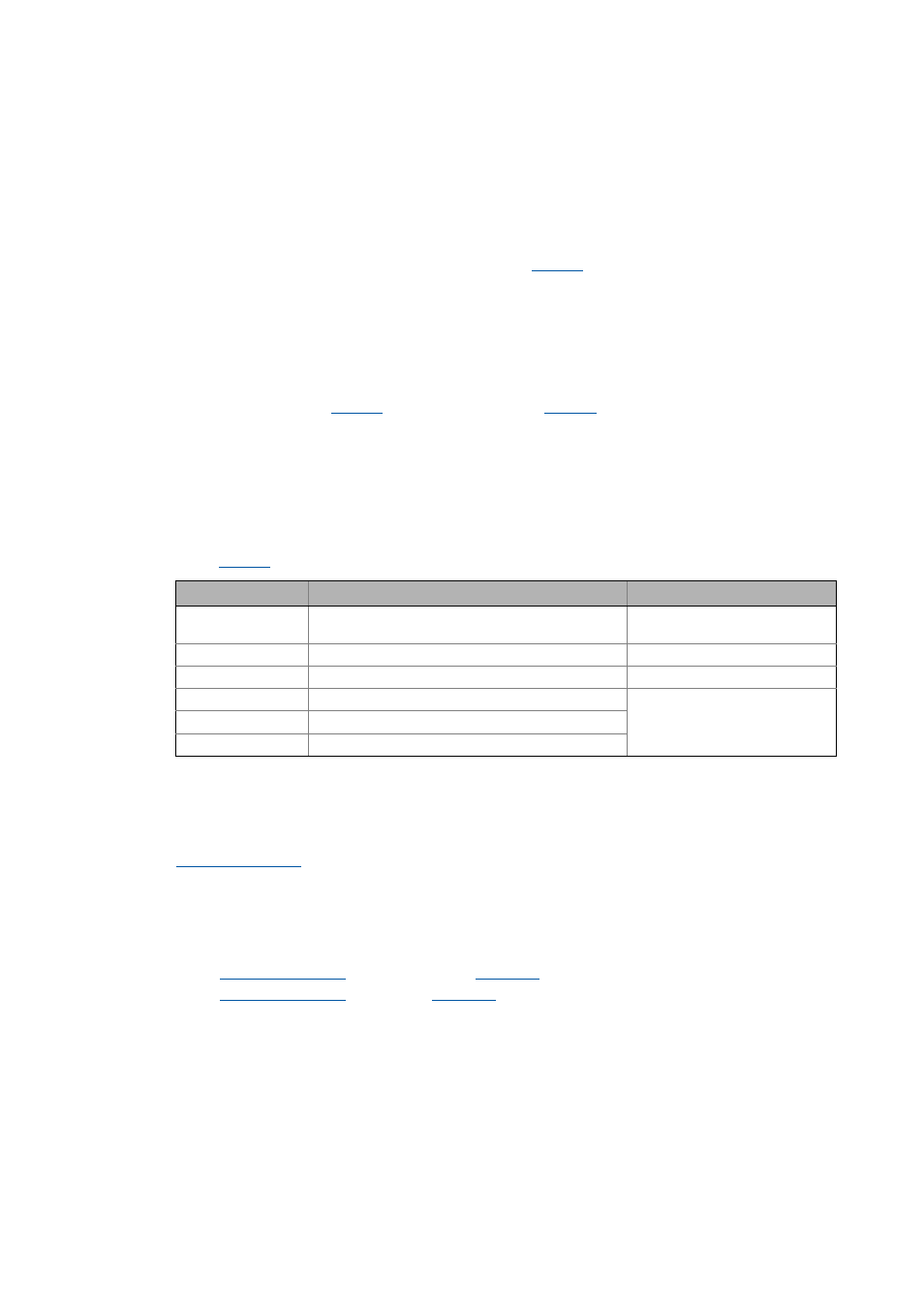
• The following arithmetic combination of main setpoint and additional setpoint can be selected
in
:
18.1.117.9 Application example for the additional load function
The motor control of the drive is provided with a function for automatically carrying along ramp
function generators for "jerk-free" setpoint connection. For speed-controlled drive tasks, the
SB outputs the current actual speed value via the nHlgSetValue_a output (e.g. in
case of a pulse inhibit, flying restart, controller inhibit).
• In case of a pulse inhibit, the main setpoint generator must be carried along with the current
actual speed value to ensure jerk-free setpoint transfer.
• The actual speed value is carried along automatically if the following wiring is provided:
•
.nHlgSetValue_a
.nCInhValue_a
•
.bHlgLoad
.bExternalCINH
Value in C00190
Function
Info
0
nNOut_a = nNSet_a
The additional setpoint nNAdd_a is
not processed.
1
nNOut_a = nNSet_a + nNAdd_a
2
nNOut_a = nNSet_a - nNAdd_a
3
nNOut_a = (nNSet_a * nNAdd_a) / 100 %
Internal scaling:
• 100 % ≡ 16384
• 1 % ≡ 164
4
nNOut_a = (nNSet_a * 1 %) / |nNAdd_a|
5
nNOut_a = (nNSet_a * 100 %) / (100 % - nNAdd_a)