5motor control (mctrl) – Lenze 8400 User Manual
Page 297
Lenze · 8400 protec HighLine · Reference manual · DMS 3.0 EN · 03/2013 · TD05
297
5
Motor control (MCTRL)
5.15
Internal interfaces | System block "LS_MotorInterface"
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
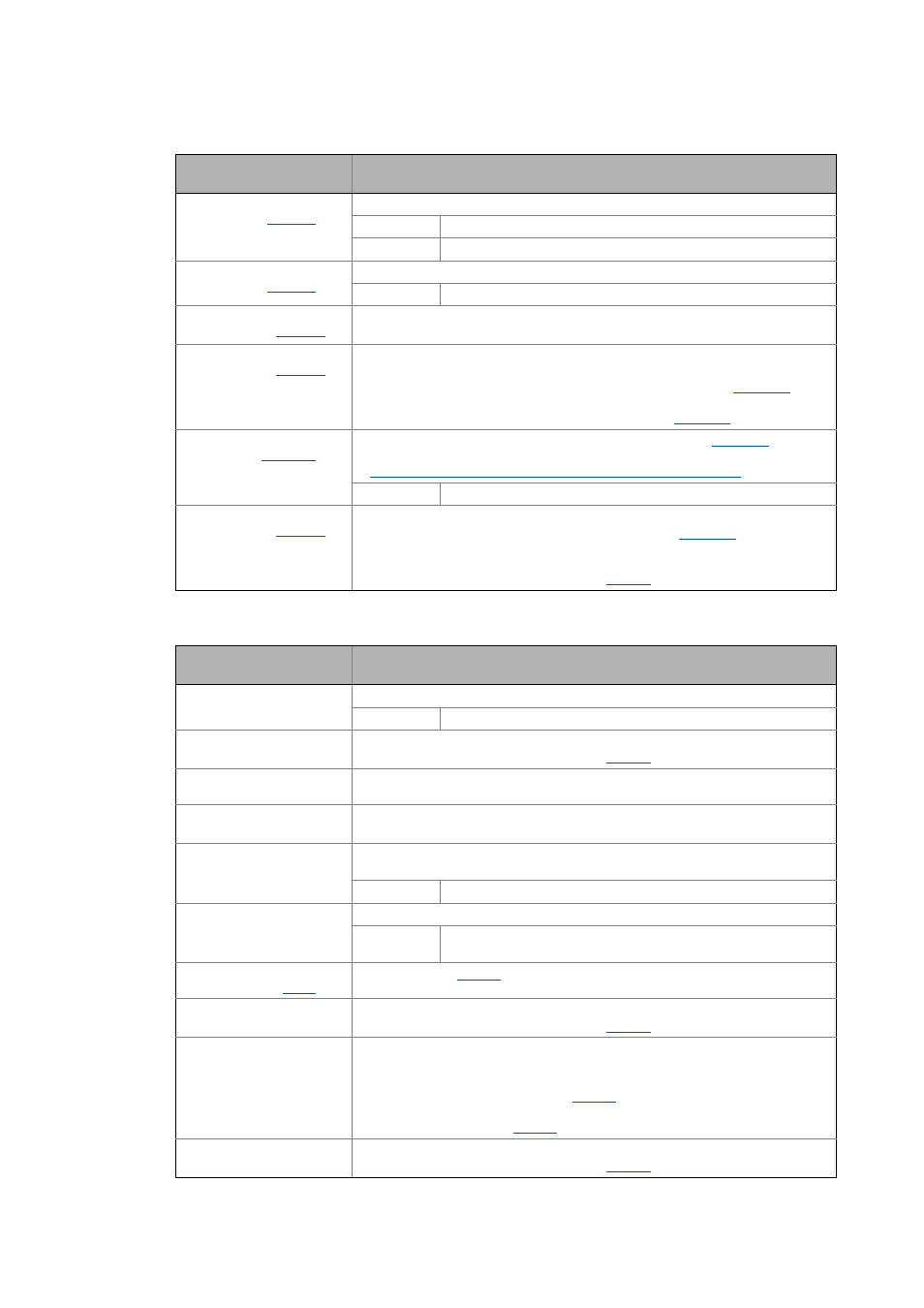
Outputs
bDcBrakeOn
| BOOL
Activate DC injection brake
FALSE Deactivate DC-injection braking
TRUE Activate DC-injection braking
bTorqueLimitAdaptOn
| BOOL
Adaptation of torque limitation
TRUE Activate adaptation of torque limitation.
nTorqueLimitAdapt_a
| INT
Value for adaptation of torque limitation
• Scaling: 16384 ≡ 100 % nTorqueMotLimit_a and nTorqueGenLimit_a
nInertiaAdapt_a
| INT
(from version 12.00.00)
Adaptation of the moment of inertia
• This process signal can be used during the process to dynamically control the
percentage of the variable moment of inertia (e.g. a reel) set in
which
is to be considered for setpoint feedforward control.
• Scaling: 16384 ≡ 100 % moment of inertia - process (
)
bBrakeChopperOn
| BOOL
(from version 12.00.00)
Switch on the internal brake chopper as "brake chopper slave" (
= "1: Yes")
when the controller is configured
Control of multiple internal brake choppers in the DC-bus system ( 278)
TRUE Switch on internal brake chopper.
nSpeedSetValueInertia_a
| INT
(from version 12.00.00)
Input for differential setpoint feedforward control (torque feedforward control)
• If the selection "1: nSpeedSetValueInertia_a" is set in
, this process
signal can be used to preselect any input value (e.g. setpoint of the position or
process controller) for torque feedforward control.
• Scaling: 16384 ≡ 100 % reference speed (
Identifier
DIS code | data type
Value/meaning
bLimPosCtrlOut
BOOL
"Position controller output inside the limitation" status signal
TRUE The position controller output is internally limited
nOutputPosCtrl_a
INT
Position controller output
• Scaling: 16384 ≡ 100 % reference speed (
dnMotorPosAct_p
DINT
Current position of the motor shaft in [increments]
dnMotorDeltaPosAct_p
DINT
Current following error in [increments]
• Following error = Difference between set position and actual position
bLimSpeedCtrlOut
BOOL
"Speed controller or manipulating variable of the slip regulator inside the limitation"
status signal
TRUE The speed controller output is internally limited
bLimSpeedSetVal
BOOL
"Reduction or increase of the setpoint speed active" status signal
TRUE Reduction or increase of the setpoint speed by the I
max
controller is
active
wMaxMotorSpeed
| BOOL
Reference speed (
)
nOutputSpeedCtrl_a
INT
Speed or slip controller output
• Scaling: 16384 ≡ 100 % reference speed (
nSpeedCtrlIAct_a
INT
Current value of speed controller integrator
• Scaling depends on the selected motor control:
• V/f control (VFCplus + encoder):
16384 ≡ 100 % reference speed (
• Servo control (SC) or vector control (SLVC):
16384 ≡ 100 % M
max
(
)
nEffSpeedSetValue_a
INT
Effective speed setpoint
• Scaling: 16384 ≡ 100 % reference speed (
Identifier
DIS code | data type
Information/possible settings