2 parameter setting, Parameter setting, 8basic drive functions (mck) – Lenze 8400 User Manual
Page 515
Lenze · 8400 protec HighLine · Reference manual · DMS 3.0 EN · 03/2013 · TD05
515
8
Basic drive functions (MCK)
8.8
Positioning
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
8.8.2
Parameter setting
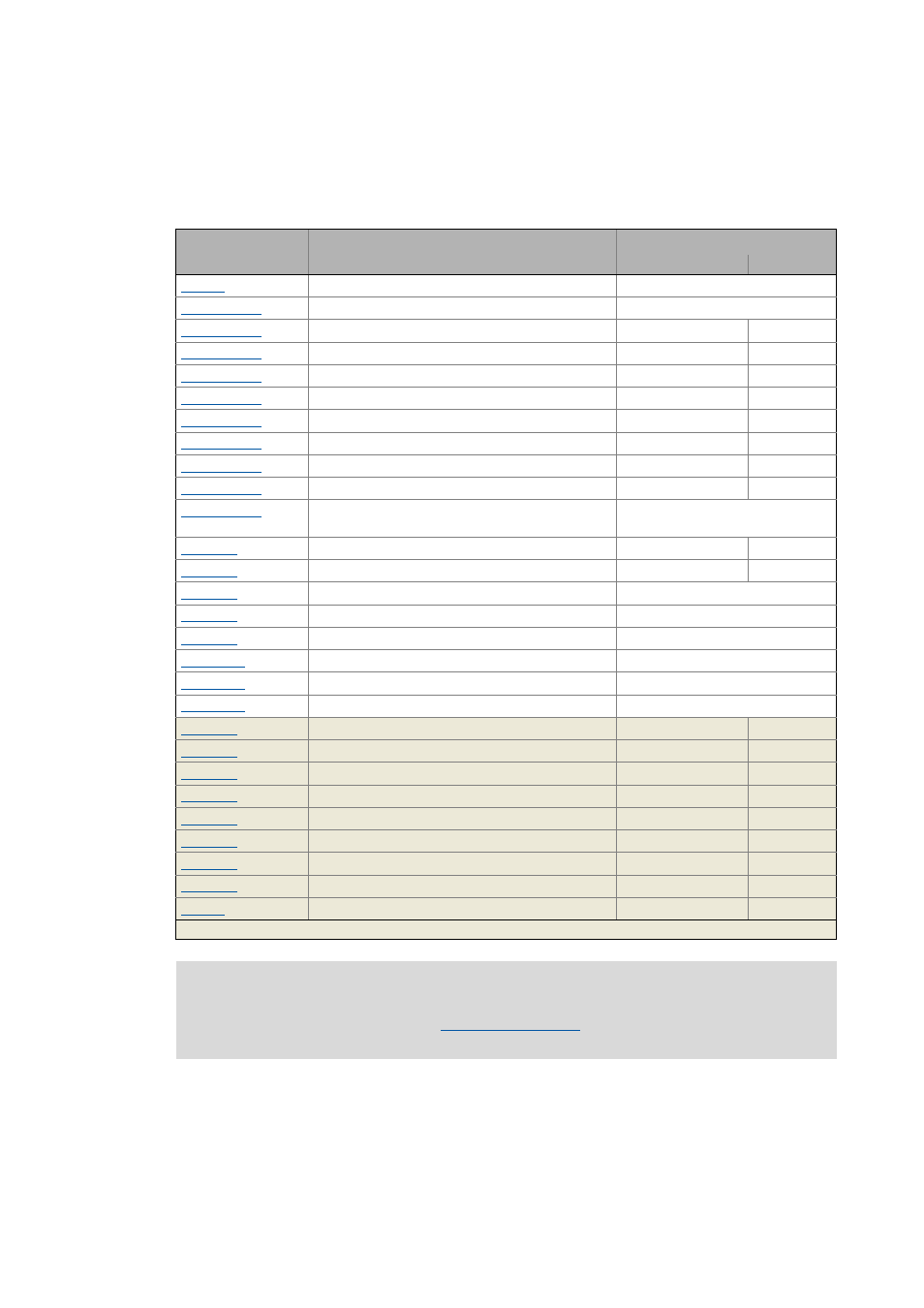
Short overview of parameters for "positioning" mode:
Parameter
Info
Lenze setting
Value Unit
MCK: Positioning setting
Bit coded
Profile 1 ... 15: Mode
1: absolute (beeline)
Profiles 1 ... 15: Position
360.0000 unit
Profile 1 ... 15: Speed
360.0000 unit/s
Profile 1 ... 15: Accel.
720.0000 unit/s2
Profile 1 ... 15: Decel.
720.0000 unit/s2
Profile 1 ... 15: Final speed
0.0000 unit/s
Profiles 1 ... 15: S-ramp time
0.000 s
Profiles 1 ... 15: Sequence profile
0
Profile 1 ... 15: TP profile
(from version 06.00.00)
0
Profile 1 ... 15: TP signal source
(from version
06.00.00)
3: TP-DigIn3
MCK: Following error limit 1
0.0000 units
MCK: Following error limit 2
0.0000 units
MCK: Resp. to following error_1
5: Warning
MCK: Resp. to following error_2
5: Warning
MCK: Resp. to invalid pos.mode
4: WarningLocked
MCK: Resp. to invalid profile data
4: WarningLocked
MCK: Resp. to invalid profile no.
4: WarningLocked
MCK: React target out of travel range
4: WarningLocked
MCK: Curr. feed
- units
MCK: Curr. set position
- units
MCK: Curr. actual position
- units
MCK: Curr. following error
- units
MCK: Positioning accuracy
- units
MCK: Target position
- units
Max. traversing speed 100%_C11
- units/s
MCK: Max. traversing distance
- units
MCK: Current pos profile number
-
Highlighted in grey = display parameter
Note!
For trouble-free operation, the
(at least gearbox factor and feed
constant) must also be set correctly!