2 ramp function generator, 3 operating range of the pid process controller, 2 ramp function generator 3 – Lenze 8400 User Manual
Page 1363: 3 operating range of the pid process controller 3, 18 function library
Lenze · 8400 protec HighLine · Reference manual · DMS 3.0 EN · 03/2013 · TD05
1363
18
Function library
18.1
Function blocks | L_PCTRL_1
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
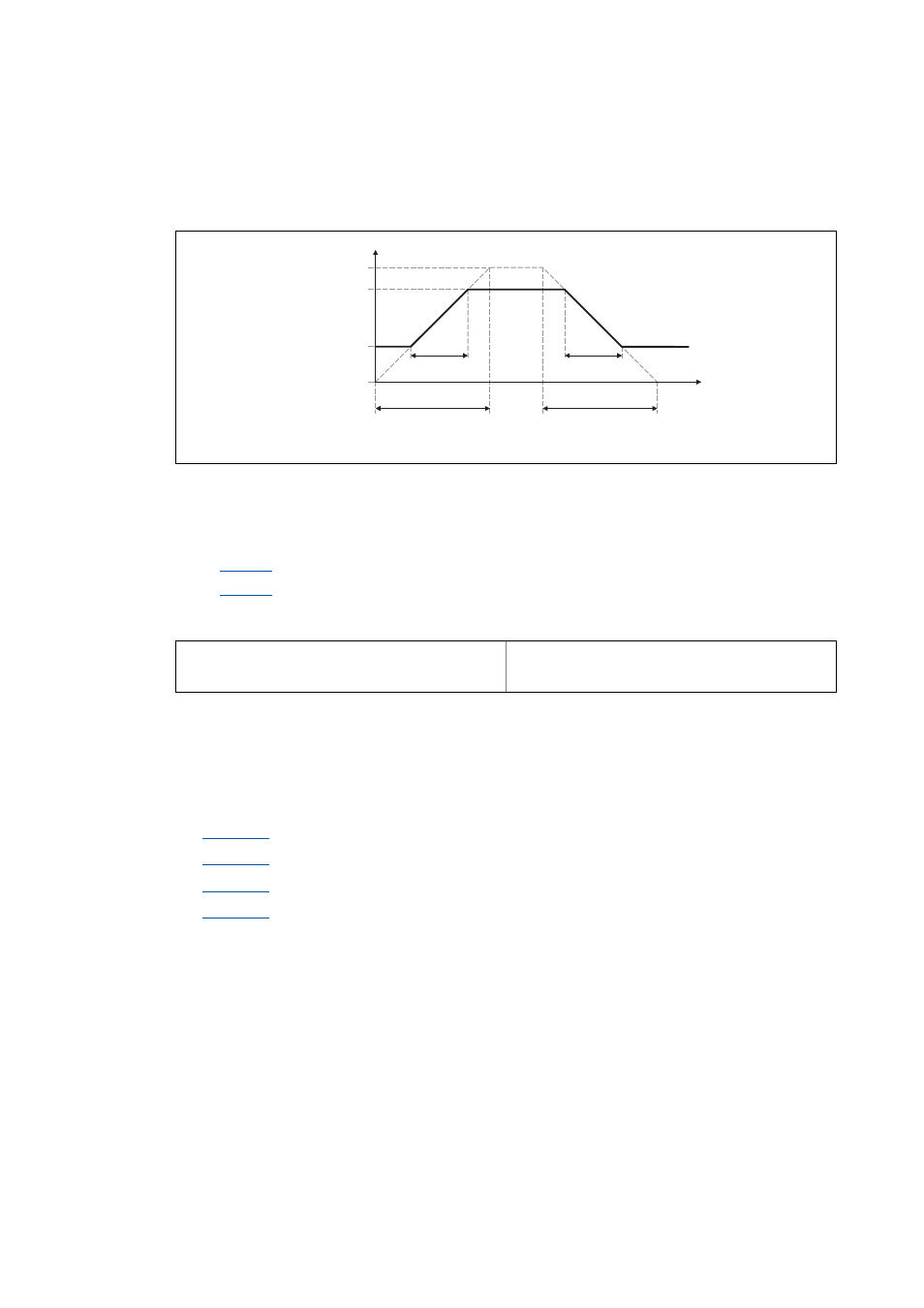
18.1.133.2 Ramp function generator
The PID output is led via a ramp function generator with linear characteristic. This serves to transfer
setpoint step-changes at the PID output into a ramp which should be as steep as possible.
[18-54] Acceleration and deceleration times
• t
ir
and t
if
are the desired times for changing between w1 and w2.
• The ramps for acceleration and deceleration can be set individually.
•
: Acceleration time t
ir
•
: Deceleration time t
if
• The t
ir
/t
if
values are converted into the required Ti times according to the following formula:
• The ramp function generator is immediately set to "0" by setting bInAct to TRUE.
18.1.133.3 Operating range of the PID process controller
The value range of the input signal nSet_a and thus the operating range of the PID process controller
can be limited with the following parameters:
•
: Pos. maximum (default setting: 199.99 %)
•
: Pos. minimum (default setting: 0.00 %)
•
: Neg. minimum (default setting: 0.00 %)
•
: Neg. maximum (default setting: 199.99 %)
w1, w2 = change of the main setpoint as a function of t
ir
and t
if
RFG-OUT = output of the ramp function generator
RFG-OUT
100 %
w2
w1
t
0 %
t
ir
t
ir
T
ir
T
ir
T
ir
t
ir
100 %
w2 w1
–
-----------------------
⋅
=
T
if
t
if
100 %
w2 w1
–
-----------------------
⋅
=