5motor control (mctrl) – Lenze 8400 User Manual
Page 195
Lenze · 8400 protec HighLine · Reference manual · DMS 3.0 EN · 03/2013 · TD05
195
5
Motor control (MCTRL)
5.7
Sensorless vector control (SLVC)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.7.4.6
Slip calculation from motor equivalent circuit diagram data
This function extension is available from version 12.00.00!
In order to achieve a better speed stability and torque accuracy, the slip calculation can be either
derived from the motor nameplate data (e.g. rated motor speed) or the motor equivalent circuit
diagram data (stator resistance, rotor resistance etc.).
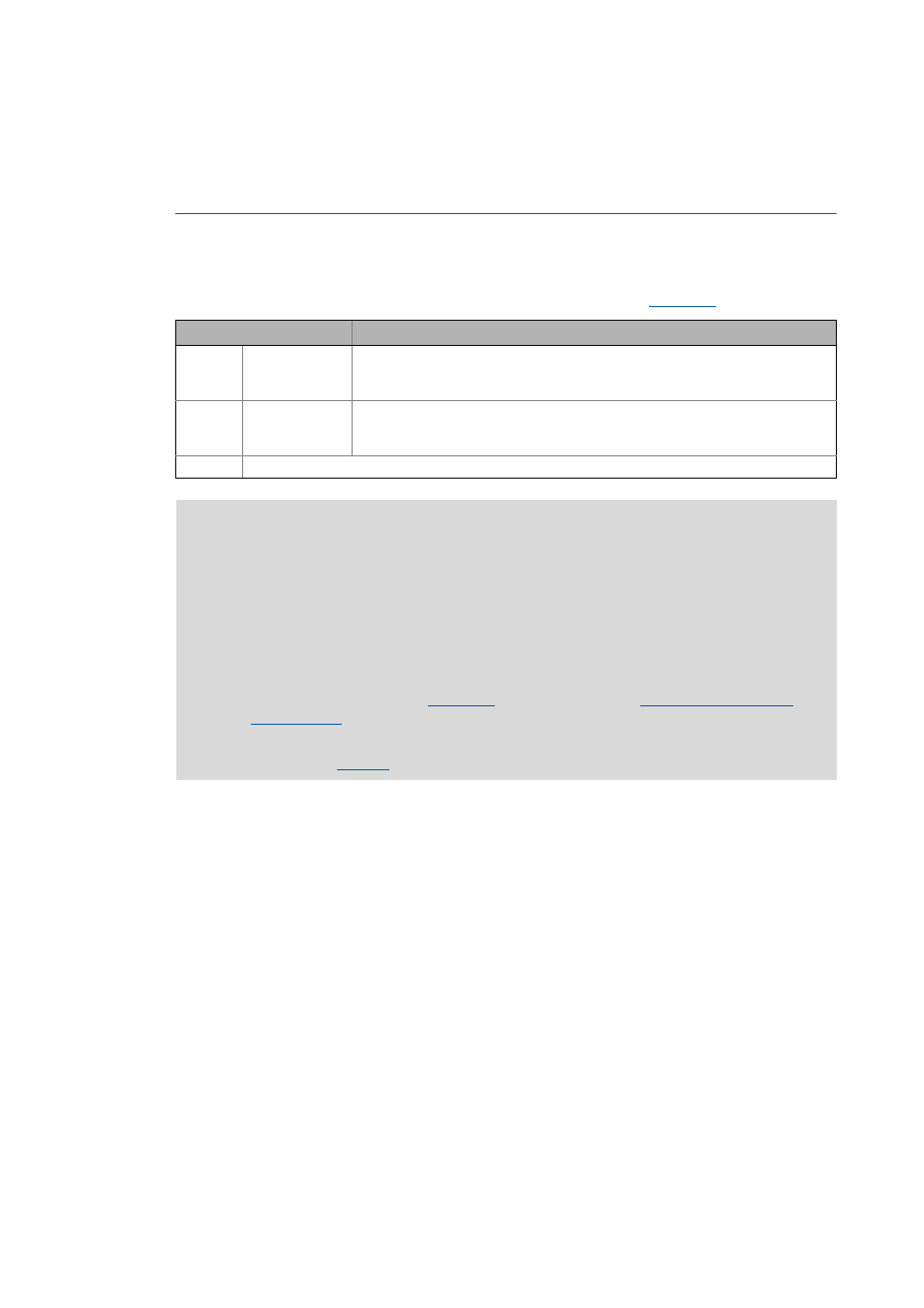
The data to be used for sensorless vector control is selected via bit 0 in
:
Setting
Info
Bit 0 SLVC
In case of sensorless vector control:
• "0" ≡ Slip calculation from motor nameplate data (Lenze setting)
• "1" ≡ Slip calculation from motor equivalent circuit diagram data
Bit 1 SC ASM
In case of servo control for asynchronous motors:
• "0" ≡ Slip calculation from motor nameplate data
• "1" ≡ Slip calculation from motor equivalent circuit diagram data (Lenze setting)
Bit 2 ... 7 Reserved
Note!
In order that the slip can be calculated from the motor equivalent circuit diagram data,
the equivalent circuit data (stator resistance, rotor resistance etc.) must be known as
exactly as possible.
• Selecting a motor in the »Engineer« motor catalogue loads the exact motor
equivalent circuit diagram data.
• When the motor nameplate data is entered manually and the motor equivalent
circuit diagram data is then detected via the motor parameter identification, the
"extended identification" (
= 2) must be used.
In the slip calculation from the motor equivalent circuit diagram data, the slip
compensation (
) has no influence anymore.