C01213 | mck: max. traversing distance, C01215 | mck: following error, C01216 | mck: positioning setting – Lenze 8400 User Manual
Page 997: C01244/2, C01215/2, C01216, G in, C01213/1, C01215/1, Ror in
Lenze · 8400 protec HighLine · Reference manual · DMS 3.0 EN · 03/2013 · TD05
997
16
Parameter reference
16.2
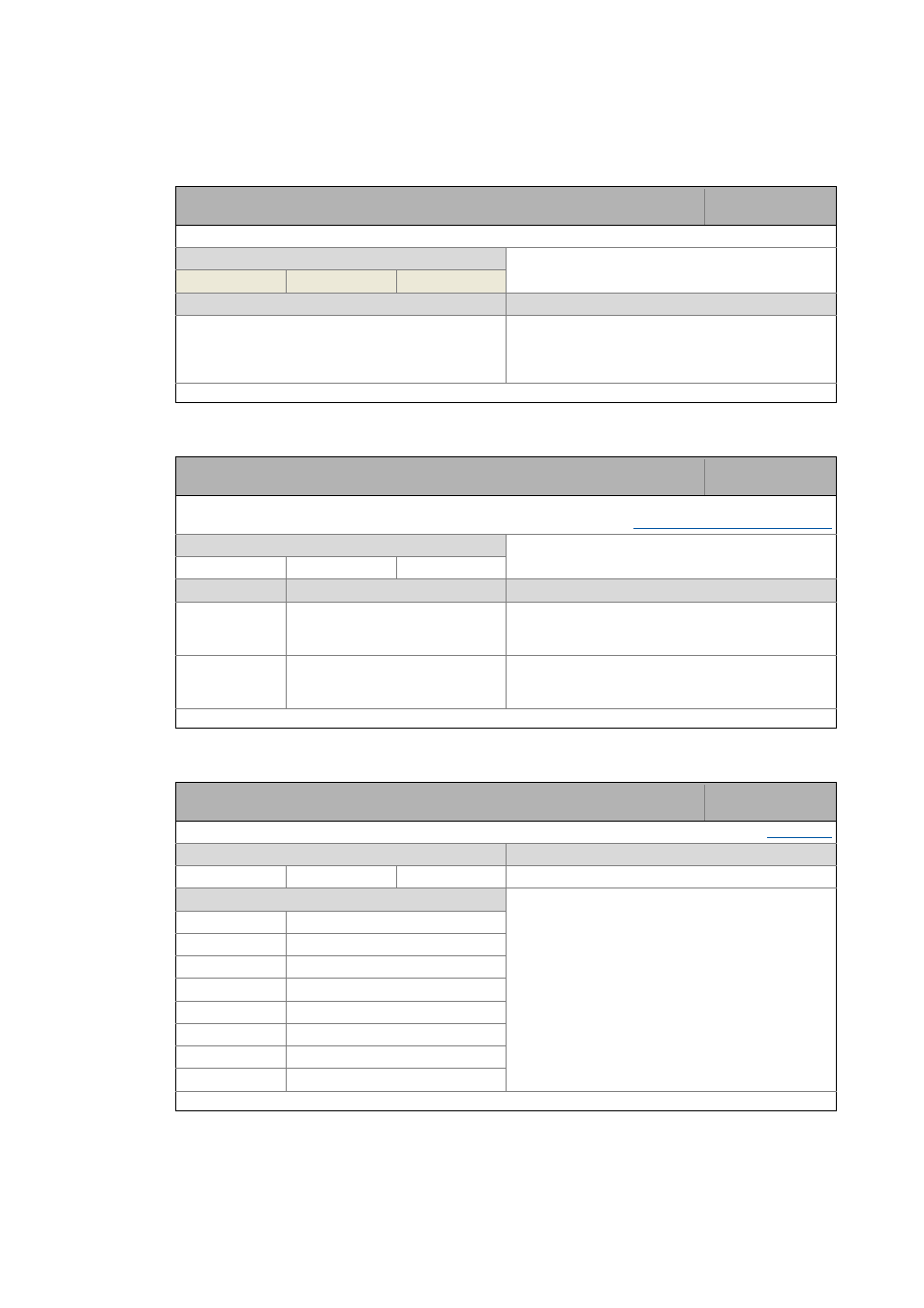
Parameter list | C01213
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
C01213
C01215
C01216
Parameter | Name:
C01213 | MCK: Max. traversing distance
Data type: INTEGER_32
Index: 23362
d
= 5B42
h
Display of current position limits
Display range
(min. value | unit | max. value)
-2147480000
units
2147480000
Subcodes
Info
C01213/1
MCK: Max. traversing distance
• Display of the maximum distance to be traversed
referred to the 32-bit display area (max. 2147483647
increments).
Read access Write access CINH PLC STOP No transfer COM MOT
Scaling factor: 1
Parameter | Name:
C01215 | MCK: Following error
Data type: INTEGER_32
Index: 23360
d
= 5B40
h
Limits for following error monitoring system
Following error monitoring system
Setting range
(min. value | unit | max. value)
0.0000
units
214748.0000
Subcodes
Lenze setting
Info
C01215/1
0.0000 units
MCK: Following error limit 1
• First limit of the maximum following error for
monitoring and response activation.
C01215/2
0.0000 units
MCK: Following error limit 2
• Second limit of the maximum following error for
monitoring and response activation.
Read access Write access CINH PLC STOP No transfer COM MOT
Scaling factor: 10000
Parameter | Name:
C01216 | MCK: Positioning setting
Data type: UNSIGNED_8
Index: 23359
d
= 5B3F
h
Setting range
(min. hex value | max. hex value)
Lenze setting
0x00
0xFF 0x01 (decimal: 1)
Value is bit-coded: ( = bit set)
Bit 0 PosAbort at PosInit
Bit 1 PosExecute active at PosInit
Bit 2 Reserved
Bit 3 Reserved
Bit 4 ProfilStart at PosInit
Bit 5 Reserved
Bit 6 Reserved
Bit 7 Reserved
Read access Write access CINH PLC STOP No transfer COM MOT