142 l_processctrl_1, 142 l_processctrl_1 5, L_processctrl_1 – Lenze 8400 User Manual
Page 1385: Nset_a, Nact, Nrtimeadapt, Biof, Reset time, Controll, 18 function library
Lenze · 8400 protec HighLine · Reference manual · DMS 3.0 EN · 03/2013 · TD05
1385
18
Function library
18.1
Function blocks | L_ProcessCtrl_1
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
18.1.142
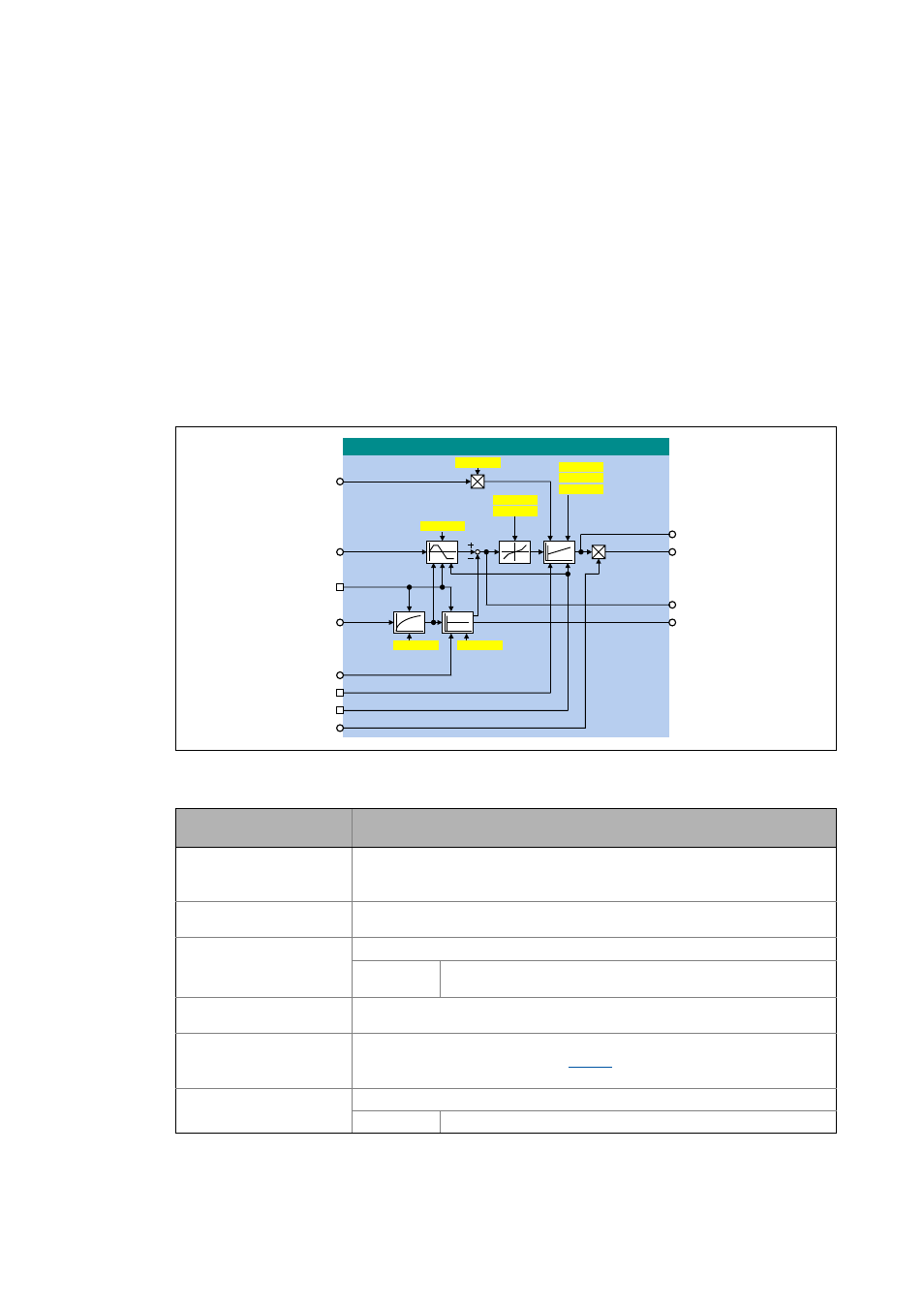
L_ProcessCtrl_1
This FB serves to implement a dancer position or tension control.
The FB is provided with the following functions:
• Adjustable control algorithm (P, PI, PID) with adaptable gain
• Reduced controller dynamics at low system deviation
• Setpoint ramp generator for preventing setpoint step-changes at the input
• Setpoint ramp generator can be loaded with actual value
• Low-pass filter and rate action in the actual value feedback
• Integral action component can be switched off
• Interruptible control
Inputs
Identifier
Data type
Information/possible settings
nVpAdapt_a
INT
Proportional evaluation of the controller gain (Vp)
• Scaling: 16384 ≡ 100 %
• Internal limitation to 0 ... 16384 (0 ... 100 %)
nSet_a
INT
Controller setpoint
bLoadAct
BOOL
Accept actual controller value
TRUE The actual controller value nAct_a is taken over into the ramp
generator, the low pass and the rate action.
nAct_a
INT
Actual controller value
nRTimeAdapt_a
INT
Proportional evaluation of the rate time in the actual value path
• Scaling: 16384 ≡ 100 % rate time (
)
• Internal limitation to 0 ... 16384 (0 ... 100 %)
bIOff
BOOL
Reset controller I component
TRUE The controller I component is reset.
/B3URFHVV&WUOB
&
Q9S$GDSWBD
Q$FWBD
Q6HWBD
Q2XW5HGBD
E/RDG$FW
Q57LPH$GDSWBD
E,2II
E5HVHW
Q,QIOXHQFHBD
Q'HYLDWLRQBD
Q'&RPSRQHQW
Q2XWBD
&
&
&
&
&
&
&
&RQWUROOHUJDLQ
*DLQRIV\VWHPGHYLDWLRQ
$FFGHFWLPH
5HVHWWLPH
5DWHDFWLRQ
&RUUHFWLQJ
YDULDEOH
OLPLWDWLRQ
)LOWHUWLPH
FRQVWDQW
5DWHWLPH
&
$UHDRIV\VWHPGHYLDWLRQ