16 parameter reference – Lenze 8400 User Manual
Page 1100
16
Parameter reference
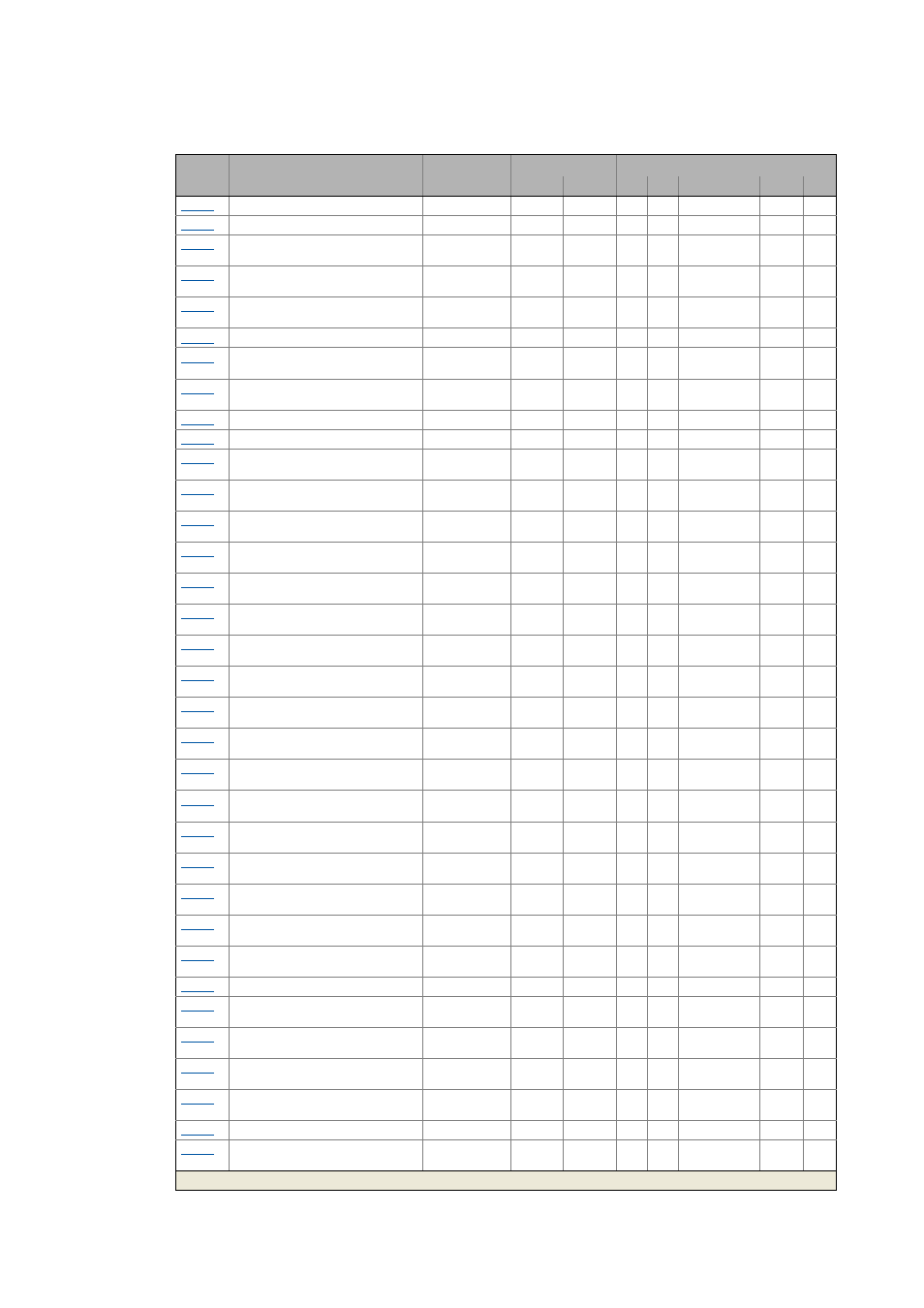
16.3
Table of attributes
1100
Lenze · 8400 protec HighLine · Reference manual · DMS 3.0 EN · 03/2013 · TD05
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
LS_WriteParamList: Frequency limitation
Linear value
22301
571D
A
8
UNSIGNED_16
1
LS_WriteParamList: Motor cable length
Linear value
22300
571C
A
4
UNSIGNED_16
10
LS_WriteParamList: Motor cable cross-
section
Linear value
22299
571B
A
4
UNSIGNED_16
100
LS_WriteParamList: PSM: Maximum
motor current field weakening
Linear value
22297
5719
A
4
UNSIGNED_16
100
LS_WriteParamList: Ultimate motor
current
Linear value
22296
5718
A
4
UNSIGNED_16
10
LS_WriteParamList: Max. motor speed
Linear value
22295
5717
A
4
UNSIGNED_16
1
LS_WriteParamList: VFC: Time const. slip
comp.
Linear value
22294
5716
A
4
UNSIGNED_16
1
LS_WriteParamList: VFC: limitation V/f
+encoder
Linear value
22291
5713
A
8
UNSIGNED_16
100
LS_WriteParamList: VFC: Vp V/f +encoder
Linear value
22290
5712
A
4
UNSIGNED_16
1000
LS_WriteParamList: VFC: Ti V/f +encoder
Linear value
22289
5711
A
4
UNSIGNED_16
10
LS_WriteParamList: VFC-ECO: Vp CosPhi
controller
Linear value
22288
5710
A
4
UNSIGNED_16
1000
LS_WriteParamList: VFC-ECO: Ti CosPhi
controller
Linear value
22287
570F
A
4
UNSIGNED_16
10
LS_WriteParamList: VFC-ECO: Minimum
voltage U/f
Linear value
22286
570E
A
4
INTEGER_16
100
LS_WriteParamList: VFC-ECO: Voltage
reduction ramp
Linear value
22285
570D
A
4
UNSIGNED_8
10
LS_WriteParamList: SLVC: Field current
controller gain
Linear value
22284
570C
A
4
INTEGER_16
100
LS_WriteParamList: SLVC: Cross current
controller gain
Linear value
22283
570B
A
4
INTEGER_16
100
LS_WriteParamList: Inverter motor brake:
nAdd
Linear value
22282
570A
A
4
INTEGER_16
1
LS_WriteParamList: Inverter motor brake:
PT1 filter time
Linear value
22281
5709
A
4
INTEGER_16
10
LS_WriteParamList: Flying restart fct.:
activation
Selection list
22280
5708
A
4
UNSIGNED_8
1 CINH
LS_WriteParamList: Flying restart fct.:
process
Selection list
22279
5707
A
4
UNSIGNED_16
1
LS_WriteParamList: Flying restart: start
frequency
Linear value
22278
5706
A
4
INTEGER_16
1
LS_WriteParamList: Flying restart fct: int.
time
Linear value
22277
5705
A
4
UNSIGNED_16
10
LS_WriteParamList: Flying restart fct.:
current
Linear value
22276
5704
A
4
INTEGER_16
100
LS_WriteParamList: SLPSM: Controlled
current setpoint
Linear value
22275
5703
A
8
UNSIGNED_16
100
LS_WriteParamList: SLPSM: Switching
speed
Linear value
22274
5702
A
8
INTEGER_16
100
LS_WriteParamList: SLPSM: Filter time -
rotor position
Linear value
22273
5701
A
4
INTEGER_16
100
LS_WriteParamList: SLPSM: Filter time
rotor position
Linear value
22272
5700
A
8
INTEGER_16
10
LS_WriteParamList: SLPSM: PLL gain
Linear value
22271
56FF
A
4
INTEGER_16
1
LS_WriteParamList: PSM: Ppp saturation
characteristic
Linear value
22270
56FE
A
68
UNSIGNED_8
1
LS_WriteParamList: PSM: Imax Ppp
saturation characteristic
Linear value
22269
56FD
A
4
UNSIGNED_16
10
LS_WriteParamList: PSM: Activate Ppp
saturation char.
Selection list
22268
56FC
A
4
UNSIGNED_8
1
LS_WriteParamList: PLI without motion:
Adaptation of time duration
Linear value
22264
56F8
A
4
INTEGER_8
1
LS_WriteParamList: PLI without motion
Bit coded
22263
56F7
A
4
UNSIGNED_16
1
LS_WriteParamList: PLI without motion:
Adaptation of ident angle
Linear value
22262
56F6
A
4
INTEGER_8
1
Code
Name
Type
Index
Data
dec
hex
DS
DA
DT
Factor
CINH
Grayed out = display parameter (read access only)