3 generation of the actual speed value, Generation of the actual speed value, 5motor control (mctrl) – Lenze 8400 User Manual
Page 262
5
Motor control (MCTRL)
5.11
Encoder/feedback system
262
Lenze · 8400 protec HighLine · Reference manual · DMS 3.0 EN · 03/2013 · TD05
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.11.3
Generation of the actual speed value
...depending on the encoder selection and mounting direction:
Up to and including version 06.xx.xx the following applies:
• For motor control types without speed feedback (
= "0: No encoder") a speed-
proportional unit is taken for calculating the nMotorSpeedAct_v speed signal. This derivation,
however, is very imprecise so that in case of applications with synchronous motors without
speed feedback it is not possible to calculate the current position from the current
nMotorSpeedAct_v speed signal.
• If no position encoder is available (
= "0: No encoder"), the dnMotorPosAct_p position
signal is always derived from the nSpeedSetValue_a speed setpoint. This derivation, however, is
very imprecise since in this case, speed limitations (e.g. by overcurrent limitations) are not
considered.
From version 12.00.00 the following applies:
• For applications with synchronous motors without speed feedback, an nMotorSpeedAct_verror-
free speed signal is available. This is calculated from the electrical output angle considering the
number of pole pairs of the nMotorSpeedAct_v speed signal.
• When synchronous or reluctance motors without feedback are used in the motor control types
V/f characteristic control (VFCplus)
Sensorless control for synchronous motors (SLPSM)
nMotorSpeedAct_v speed signal can be used to create an error-free position signal via a control
if the nMotorSpeedAct_v signal is read out by the control in a 1 ms cycle.
• If no position encoder is available (
= "0: No encoder"), the dnMotorPosAct_p position
signal is continued to be derived from the nSpeedSetValue_a speed setpoint. The extended
selection text "0: No encoder:nSpeedSetValue_a" in
refers to this behaviour.
• The new selection "10: No encoder: C495 or nMotorSpeedSetAct_v" in
is used to
calculate the dnMotorPosAct_p position signal either from the set speed feedback (when
> 0) or from the nMotorSpeedAct_v speed signal (when
= 0).
• For all motor control types without speed feedback, this selection serves to improve the
creation of the dnMotorPosAct_p position signal.
• When synchronous or reluctance motors without feedback are used, the dnMotorPosAct_p
position signal can be created correctly.
• In case of the motor control types with speed feedback, the dnMotorPosAct_p position signal
is directly created from the speed feedback signal.
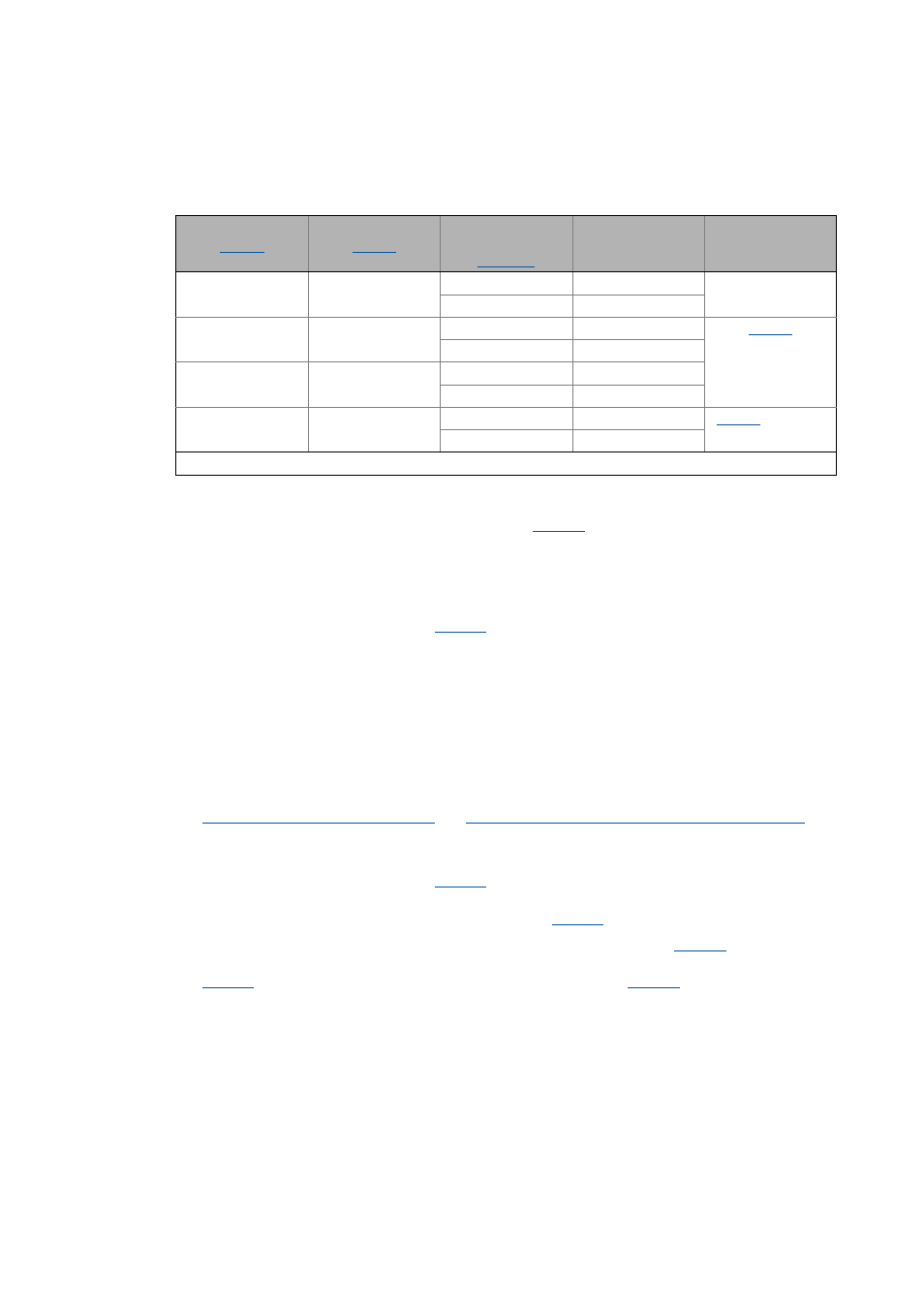
Speed sensor
Position encoder
(
Motor mounting
direction
)
Direction of rotation
of motor shaft
(at setpoint = Cw)
Actual speed value
(nAct_v)
not inverted
Cw
ΔSetPos
inverted
Ccw
not inverted
Cw
inverted
Ccw
not inverted
Cw
inverted
Ccw
not inverted
Cw
ΔActPos
inverted
Ccw
no encoder
Encoder set