8 resolution of an encoder revolution, Resolution of an encoder revolution, 5drive interface – Lenze E94AxPExxxx User Manual
Page 88
5
Drive interface
5.1
Machine parameters
88
Lenze · 9400 Servo PLC· Reference manual · DMS 4.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.1.8
Resolution of an encoder revolution
serves to adjust the resolution to the application.
• The default resolution of 16 bits/revolution is sufficient for standard applications.
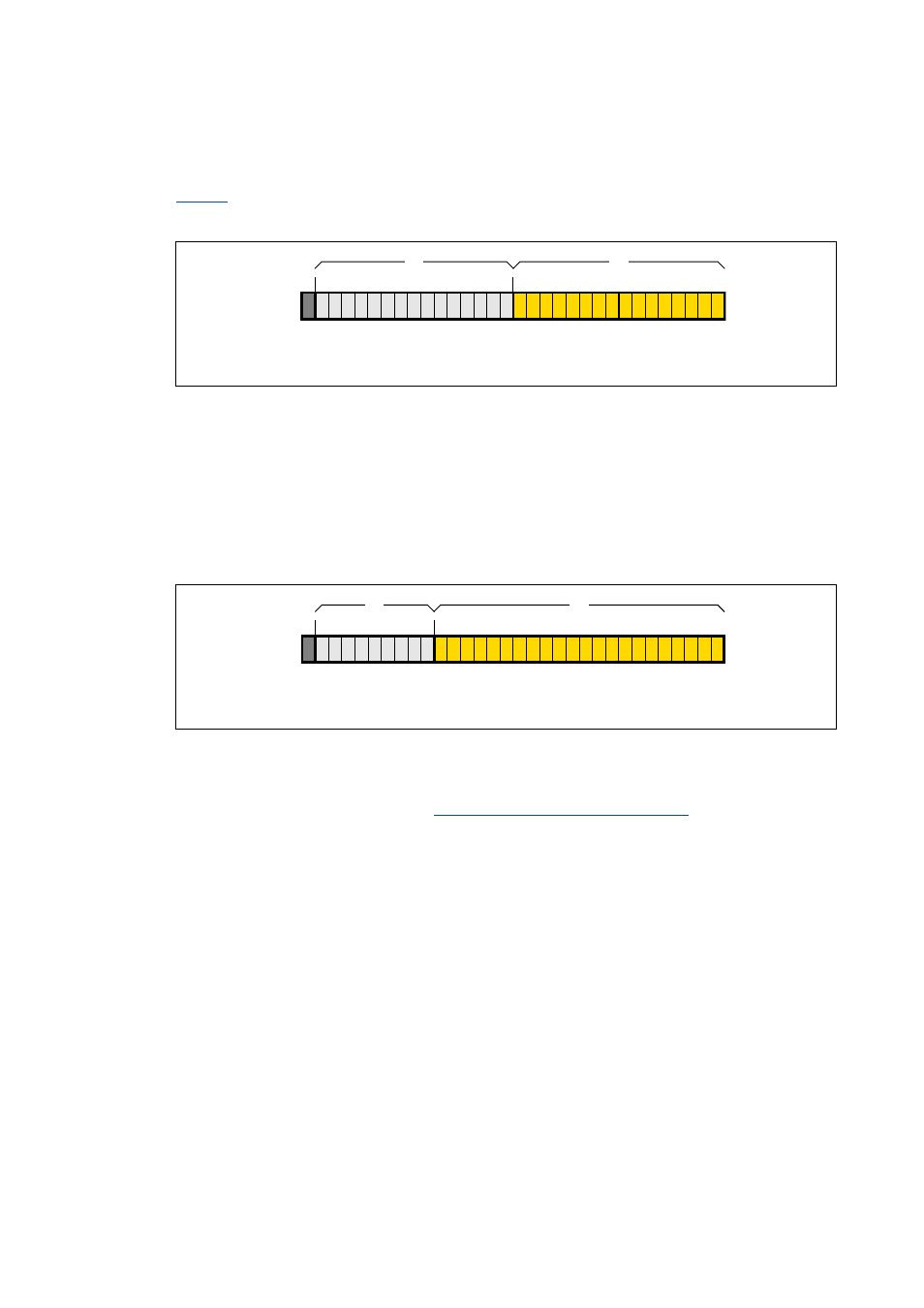
[5-10] Example: standard resolution (16 bits/revolution)
• For more significant applications, a higher resolution of the position values can clearly improve
the control properties and positioning accuracies:
• Finer resolution of the position targets improved positioning accuracy
• Finer quantisation of setpoints and actual values better control quality
• Higher loop gain adjustable less following errors
• However, a higher resolution at the same time causes a restricted number of encoder
revolutions, and only smaller traversing distances can be displayed.
[5-11] Example: Higher resolution (22 bits/revolution) with a restricted traversing range
Tip!
In the following subchapter "
Determining the optimum resolution
it is described
how you can determine the optimum resolution of the position values.
Sign bit
Number of revolutions: 15 bits ≡ ±32767 revolutions
Resolution of one encoder revolution: 16 bits ≡ 65536 increments/revolution
%LW
Sign bit
Number of revolutions: 9 bits ≡ ±512 revolutions
Resolution of one encoder revolution: 22 bits ≡ 4194304 increments/revolution
%LW