12 basic drive functions – Lenze E94AxPExxxx User Manual
Page 582
12
Basic drive functions
12.12
Brake control
582
Lenze · 9400 Servo PLC· Reference manual · DMS 4.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Process
If all requirements mentioned before have been met, the brake test can be started by setting the
input BRK_bBrakeTest to TRUE.
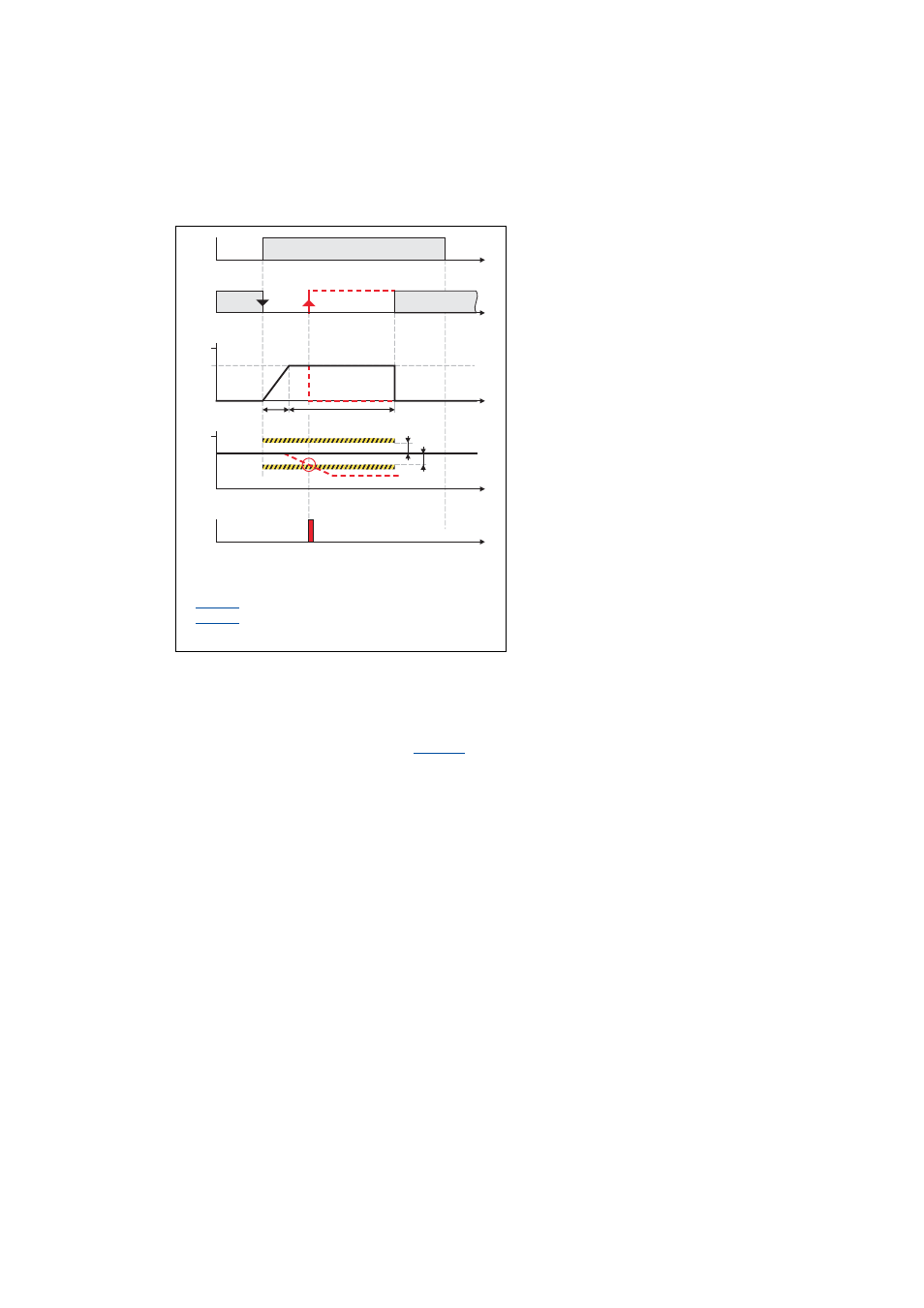
[12-47] Sequence of the brake test
Error behaviour
If during the brake test the stop position of the motor axis has changed by more than the
permissible angle of rotation set in
, although the brake is engaged:
• The brake test is cancelled immediately and "Quick stop by trouble" is activated as error
response to avoid a further rotation/acceleration of the drive.
• The error message "Motor brake: Angular drift with closed brake too high" is entered into the
logbook.
• The status "position drift when brake is applied" is displayed for one cycle at the BRK_dnState
status output via bit 21 and the status "brake error" is displayed via bit 15.
• The BRK_bError output is set to TRUE for one task cycle.
Normal behaviour
Error behaviour
: Test torque
: Permissible angle of rotation
CINH = controller inhibit
• The specified test torque is created via a
ramp generator with an acceleration time
of 1 s and held max. 4 s.
• By this the motor shaft tries to rotate
while the brake is applied.
• By resetting the input BRK_bBrakeTest to
FALSE the brake test can be aborted.
t
?
0
1
M
t
j
t
t
BRK_bBrakeTest
CINH
1 s
max. 4 s
t
BRK_bError