3 hardware limit positions (limit switch), Hardware limit positions (limit switch), 12 basic drive functions – Lenze E94AxPExxxx User Manual
Page 545: Stop
Lenze · 9400 Servo PLC· Reference manual · DMS 4.0 EN · 11/2013 · TD05/06
545
12
Basic drive functions
12.11
Limiter
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
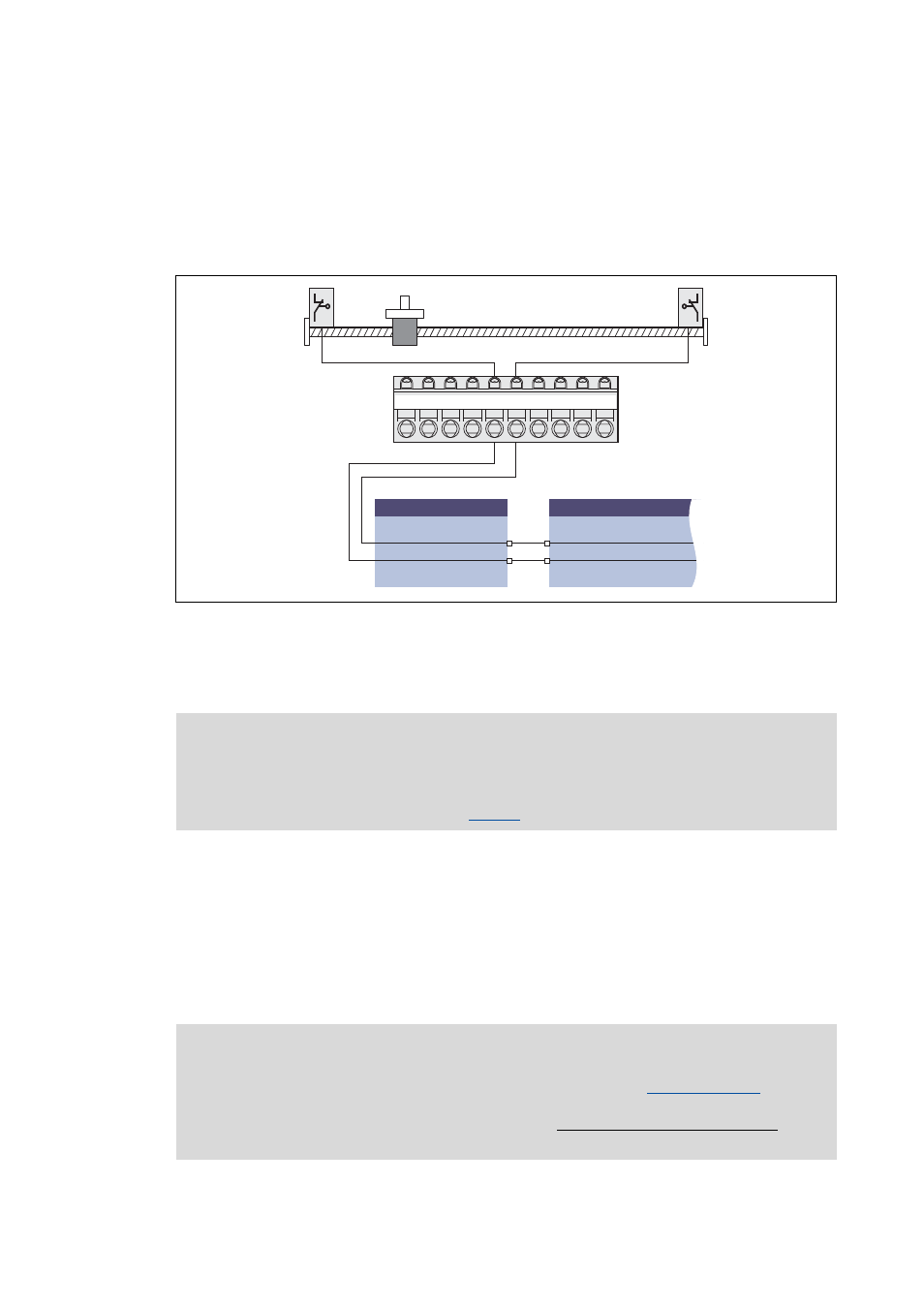
12.11.2.3 Hardware limit positions (limit switch)
Monitoring of the travel range limit by means of limit switches is effected via the inputs
LIM_bLimitSwitchPositive and LIM_bLimitSwitchNegative of the LS_Limiter SB.
• The two inputs respond to the TRUE state and are to be connected to the corresponding digital
inputs to which the limit switches are connected:
[12-28] Example: Connection of the travel range limit switches to the digital inputs DI3 & DI4
• If the limit switches are connected to decentralised terminals, the two inputs
LIM_bLimitSwitchPositive and LIM_bLimitSwitchNegative can be connected to the decentralised
terminal via a bus system (e. g. system bus).
• If one of the two monitoring inputs is set to TRUE:
• The error response "quick stop by trouble" is carried out, i.e. the drive is braked to standstill
within the deceleration time set for the quick stop function irrespective of the setpoint
selection.
• The fault message "Pos. SW limit switch has tripped" or "Neg. SW limit has tripped" is entered
in the logbook of the controller.
• A corresponding status is output via the LIM_dnState output.
• The drive can only be traversed again after the error has been acknowledged.
X5
GI
RFR
DI1
DI2
DI3
DI4
DI5
DI6
DI7
DI8
LS_DigitalInput
DIGIN_bIn4
DIGIN_bIn3
LS_Limiter
LIM_bLimitSwitchPositive
LIM_bLimitSwitchNegative
Note!
If the digital inputs used for the connection of the limit switches are to be designed in a
fail-safe manner (activation at LOW level), you simply change the terminal polarity of
the corresponding digital inputs in
.
Stop!
If a limit switch is approached by means of the basic function
and by
this a fault with the "Quick stop by trouble" response is activated, always a set/actual
adjustment of the position has to be carried out before the fault is acknowledged, as
otherwise an uncontrolled motor movement may result after the fault is acknowledged!