6motor interface – Lenze E94AxPExxxx User Manual
Page 280
6
Motor interface
6.10
Internal interfaces | "LS_MotorInterface" system block
280
Lenze · 9400 Servo PLC· Reference manual · DMS 4.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
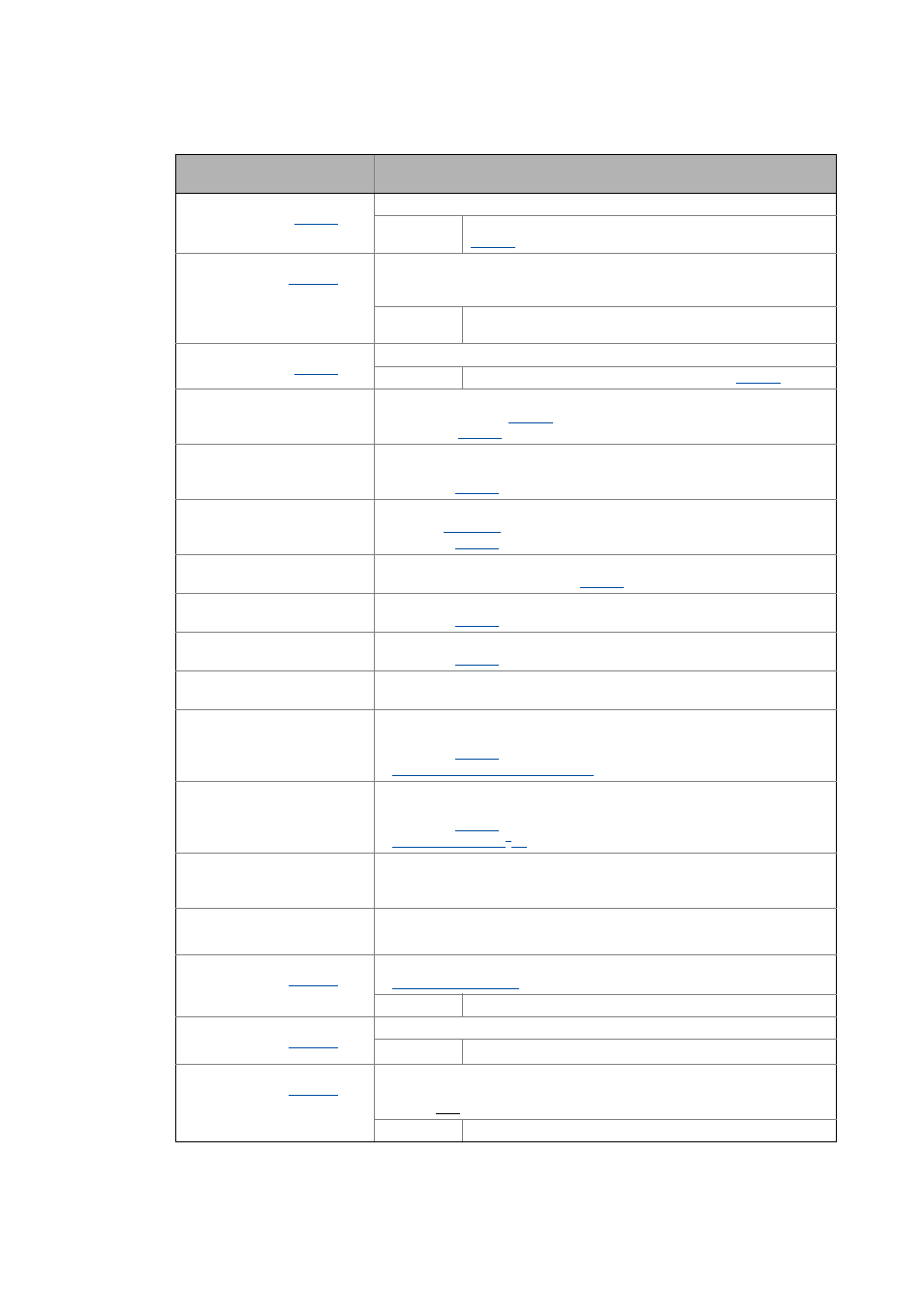
MI_bCurrentSetpointLimited
| BOOL
Status signal "Setpoint for current controller at the limit"
TRUE The setpoint for the current controller is limited to I
max_device
MI_bMotorOverloadWarning
| BOOL
Status signal "Motor overload"
• Group signal for warning signals from temperature monitoring (KTY, PTC,
thermal switch) or I
2
xt monitoring.
TRUE One of the monitoring modes for motor overload protection is
active.
MI_bSpeedBelowThresholdC19
| BOOL
Status signal "Standstill reached"
TRUE The current speed is below the threshold set in
MI_dnActualMotorCurrent_n
DINT
Actual motor current
• 100 % ≡ I
max_device
• Display in
in [A]
MI_dnActualMotorVoltage_n
DINT
Current motor voltage
• 100 % ≡ 1000 V
• Display in
in [V]
MI_dnActualMotorTorque_n
DINT
Current motor torque
• Display in
in [Nm]
MI_dnActualMotorSpeed_n
DINT
Current speed of the motor shaft in [%]
• 100 % ≡ Motor reference speed (
)
MI_dnActualMotorSpeed_s
DINT
Current speed of the motor shaft in [rpm]
• Display in
MI_dnActualMotorPos_p
DINT
Current position of the motor shaft in [increments]
• Display in
MI_dnActualDCBusVoltage_n
DINT
Actual DC-bus voltage
• 100 % ≡ 1000 V
MI_dnThermalLoadDevice_n
DINT
Thermal device utilisation in [%]
• Current result of the Ixt calculation.
• Display in
Monitoring of the device utilisation ( 156)
MI_dnThermalLoadMotor_n
DINT
Thermal motor utilisation in [%]
• Current result of the I
2
xt calculation.
• Display in
MI_dnActualMotorFreq_s
DINT
Current motor frequency in [Hz]
The motor frequency corresponds to the field frequency [Hz].
Field frequency [Hz] = motor speed × number of motor pole pairs
MI_dnActualFlux_n
DINT
Actual flux value
MI_bFlyingSyncBusy
| BOOL
"Flying restart function active" status signal
Flying restart function ( 257)
TRUE Flying restart function is active
MI_bClampIsActive
| BOOL
Status signal "Clamping is active"
TRUE Clamping is active.
MI_bMagnetisationFinished
| BOOL
Status signal "Motor magnetisation is completed"
Note:
This bit is only supported in the SLVC control mode (sensorless vector control).
TRUE Motor magnetisation is completed.
Identifier
DIS code | data type
Value/meaning