9 monitoring, 1 node guarding protocol, 10 "can on board" system bus – Lenze E94AxPExxxx User Manual
Page 368
10
"CAN on board" system bus
10.9
Monitoring
368
Lenze · 9400 Servo PLC· Reference manual · DMS 4.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
10.9
Monitoring
10.9.1
Node guarding protocol
In a CAN network, the node guarding protocol serves to monitor the connection between the NMT
master and the NMT slave(s). If the controller was parameterised as NMT master, it can monitor up
to 32 NMT slaves.
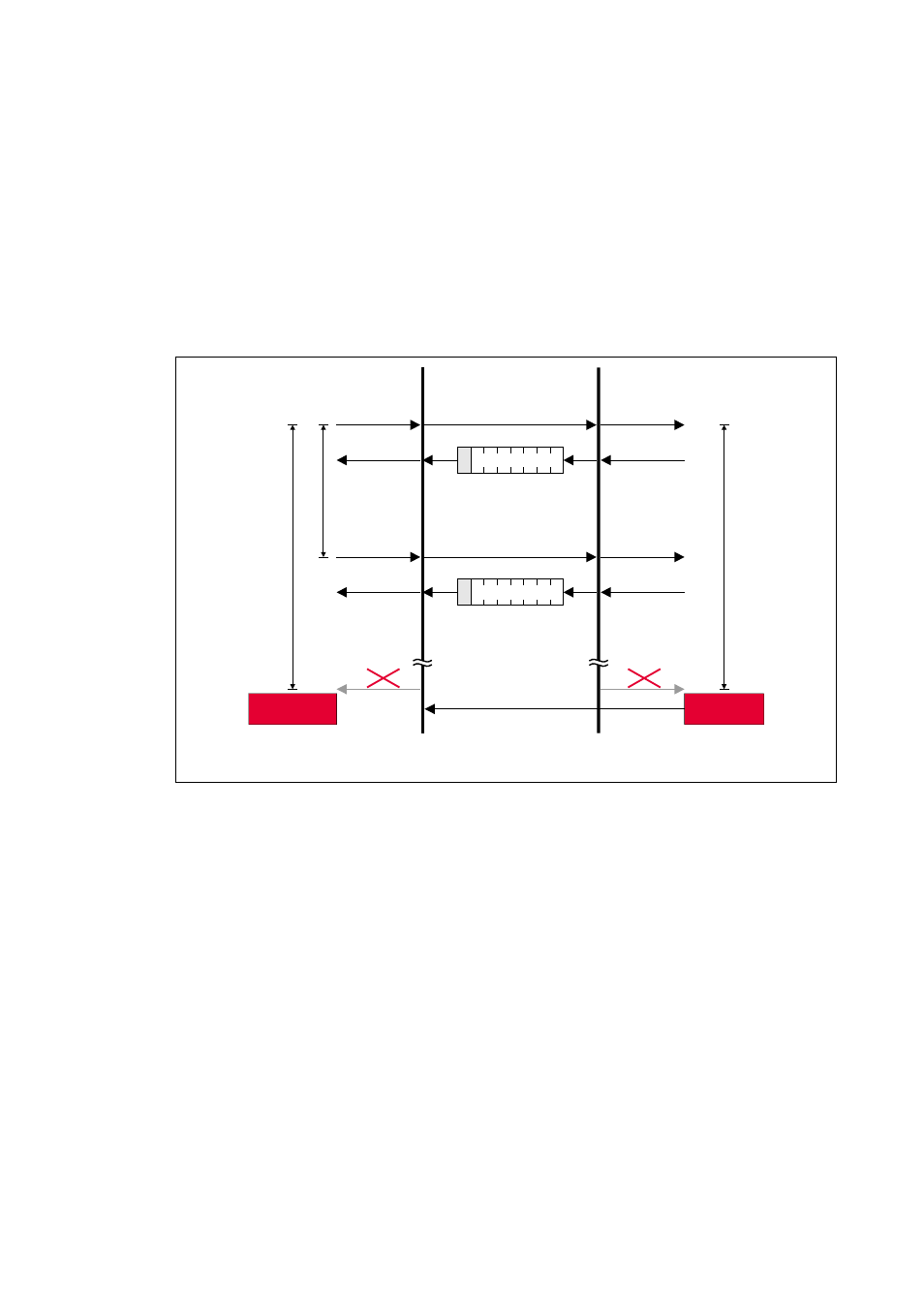
Basic workflow
[10-9] Node guarding protocol
1. The NMT master within cyclic time intervals sends a data telegram to the NMT slave, which is
referred to as "Remote Transmission Request" (RTR).
2. The NMT slave then returns a response telegram ("Response") to the NMT master.
t: Toggle bit
s: NMT slave status (4: Stopped, 5: Operational, 127: Pre-Operational)
UHTXHVW
LQGLFDWLRQ
107PDVWHU
(0(5*(1&<
107VODYH
*XDUGWLPH
/LIHJXDUGLQJ
HYHQW
W
FRQILUPDWLRQ
UHVSRQVH
V
575
UHTXHVW
LQGLFDWLRQ
W
FRQILUPDWLRQ
UHVSRQVH
V
575
1RGHOLIHWLPH *XDUGWLPH[/LIHWLPHIDFWRU
1RGHJXDUGLQJ
HYHQW
LQGLFDWLRQ
FRQILUPDWLRQ
1RGHOLIHWLPH *XDUGWLPH[/LIHWLPHIDFWRU