3 adjusting motor and controller to each other, Adjusting motor and controller to each other, 6motor interface – Lenze E94AxPExxxx User Manual
Page 171
Lenze · 9400 Servo PLC· Reference manual · DMS 4.0 EN · 11/2013 · TD05/06
171
6
Motor interface
6.3
Adjusting motor and controller to each other
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
6.3
Adjusting motor and controller to each other
This "initial commissioning" of the motor is required if no motor data suitable for the application is
available yet in the memory module of the controller and in the »Engineer« project .
• The following step-by-step instructions can be used as a "check list" to correctly adjust the
motor and controller to each other.
• Detailed information on the individual steps can be found in the following subchapters.
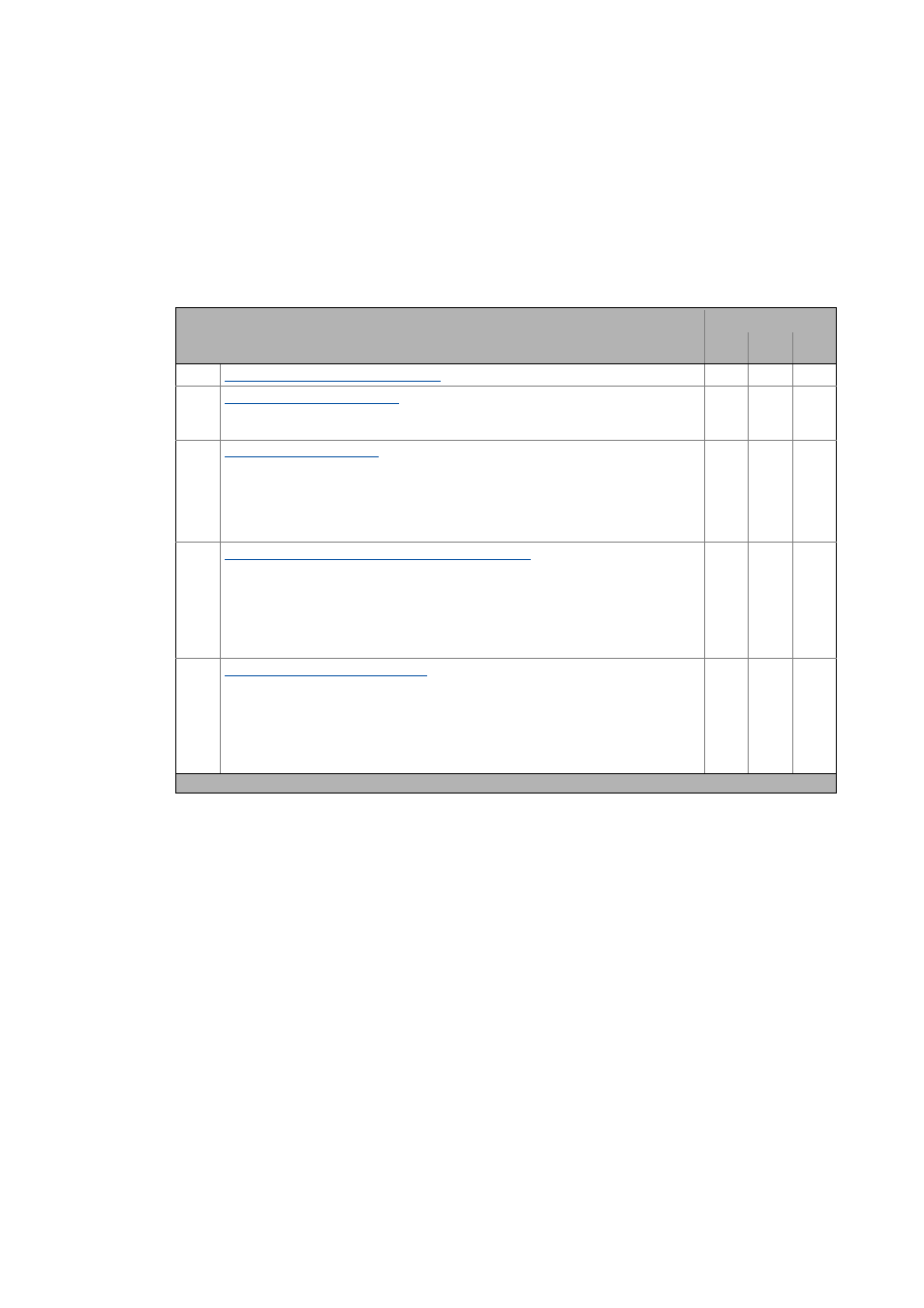
Worksteps
Motor control*
SC
SLVC
VFC
plus
1.
Accepting/adapting plant parameters
2.
• Only required for the control types with speed feedback (servo control and V/f
control).
()
3.
• Only required:
• For servo control with synchronous motor of a third-party manufacturer.
• For servo control with synchronous motor and use of incremental encoders
(TTL or sin/cos encoders as well as multi-pole pair resolvers).
• After changes of the motor feedback system, e.g. encoder exchange.
()
4.
Optimising the switching performance of the inverter
• Only required for servo control if the motor parameters are to be defined by a
motor from a third-party manufacturer!
• Always required for sensorless vector control and open loop V/f control!
• An optimum drive performance can only be achieved with the sensorless
operating modes if the voltage errors in the inverter are compensated as
exactly as possible.
()
5.
Determining the motor parameters
• Only required for servo control if the motor parameters are to be defined by a
motor from a third-party manufacturer!
• Always required for sensorless vector control!
• An optimum drive performance can only be achieved with the sensorless
vector control if the motor parameters correspond to the real motor as exactly
as possible.
()
* SC = servo control
SLVC = sensorless vector control
VFCplus = V/f control