6motor interface – Lenze E94AxPExxxx User Manual
Page 278
6
Motor interface
6.10
Internal interfaces | "LS_MotorInterface" system block
278
Lenze · 9400 Servo PLC· Reference manual · DMS 4.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
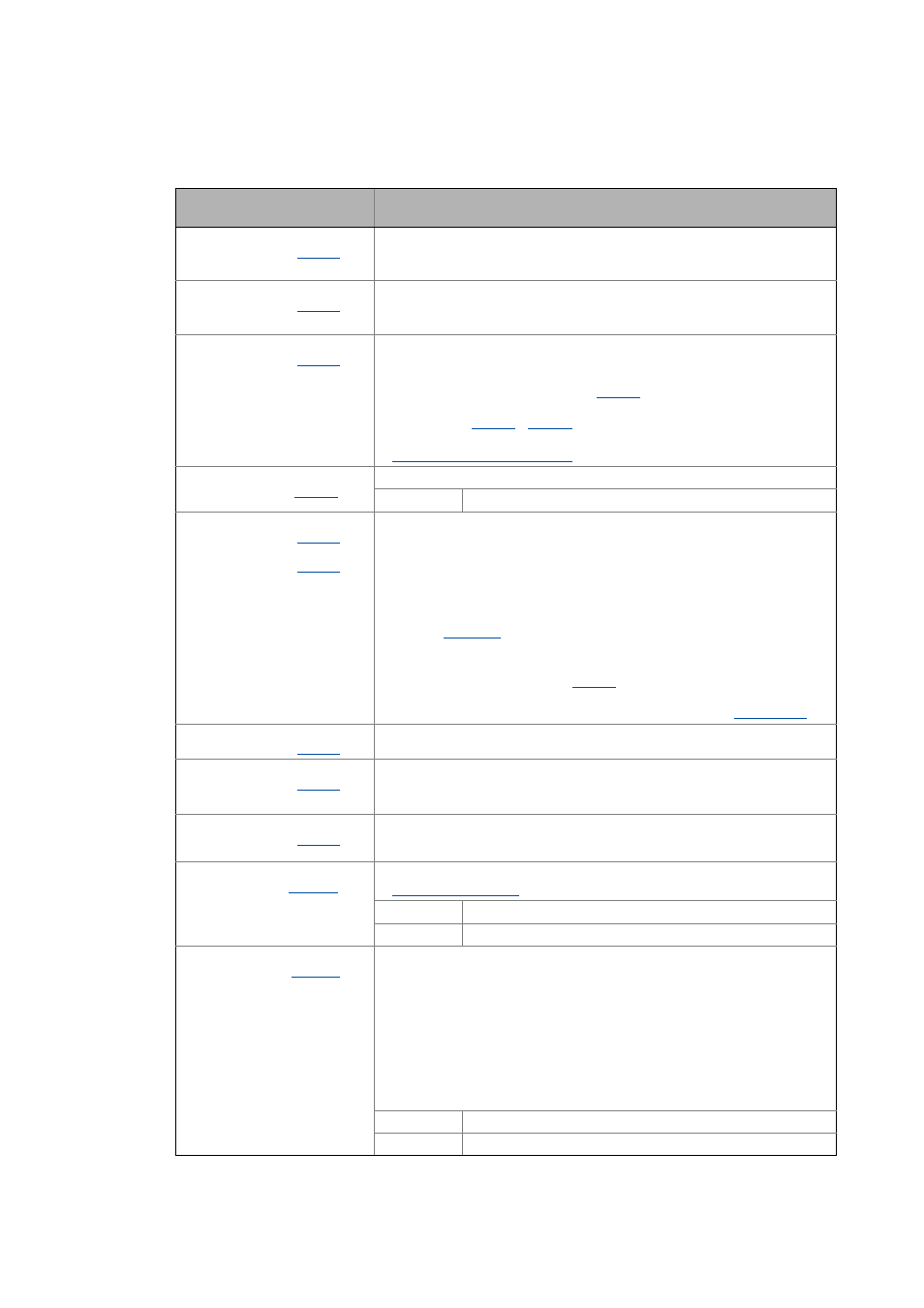
Inputs
Identifier
DIS code | data type
Information/possible settings
MI_dnPosCtrlAdaptLoad_n
| DINT
Dynamic change of the proportional gain Vp of the position controller during
operation
• Internal limitation to 0 ... 200 %
MI_dnPosCtrlAdaptMotor_n
| DINT
Dynamic change of the proportional gain Vp of the phase controller during
operation
• Internal limitation to 0 ... 200 %
MI_dnSpeedCtrlAdapt_n
| DINT
Dynamic change of the proportional gain Vp of the speed controller during
operation
• If the input is assigned, the following applies:
V
P
= MI_dnSpeedCtrlAdapt_n [%] *
• If the input is not assigned, the following applies:
V
P
= 100 % *
• Internal limitation to 10 ... 200 %
Optimising the speed controller ( 195)
MI_bResetSpeedCtrlIntegrator
| BOOL
Reset integral action component in the speed controller
TRUE Integral action component is reset to "0".
MI_dnTorqueHighLimit_n
| DINT
MI_dnTorqueLowLimit_n
| DINT
Upper/lower limit value for correcting variable of the speed controller and total
torque setpoint
• These two inputs serve to select an external torque limitation.
• If the motor torque reaches the selected limits, the drive can no longer
follow the speed setpoint!
• If the torque limitation is active, the output MI_bTorqueSetpointLimited is
set to TRUE.
• Only a positive torque is permissible as upper limit value.
• Only a negative torque is permissible as lower limit value.
• The motor mounting position (
) defines the assignment to the
limitation inputs of the motor control.
• The internally effective torque limit values are displayed in
.
MI_dnFluxSetpoint_n
| DINT
Setpoint for the field controller
MI_dnInertiaAdapt_n
| DINT
Adaptation of the moment of inertia in [%]
• If input is not assigned = 100 %
• Internal limitation to 0 ... 200 %
MI_dnBoostSet_n
| DINT
Boost voltage
• 100 % ≡ 1000 V
MI_bFlyingSyncBlocked
| BOOL
Block flying restart
Flying restart function ( 257)
FALSE Flying restart function is active
TRUE Flying restart process is blocked.
MI_dnTorqueAdd_n
| DINT
Additional torque feedforward control value in [%]
This input serves to provide an additional torque setpoint. In this way, you can
provide an additional torque for the basic functions manual jog, positioning and
homing besides the acceleration feedforward control.
• 100 % = motor reference torque
If the controller is enabled, the torque setpoints at this input have a direct effect
on the drive!
The user has to
• apply the appropriate setpoint for every state of the drive.
• avoid setpoint step-changes.
- 200 %
+ 200 %