I-1801/1, 10 "can on board" system bus – Lenze E94AxPExxxx User Manual
Page 400
10
"CAN on board" system bus
10.10
Implemented CANopen objects | I-1801
400
Lenze · 9400 Servo PLC· Reference manual · DMS 4.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Subindex 3 - inhibit time
The delay time can only be changed if the PDO is inactive (subindex 1, bit 31 = 1). The entered value
multiplied by 0.1 results in the delay time in [ms]. The calculated delay time is always rounded down
to an inter value.
Example:
• Entered value: 26
• Calculated time = 26 * 0.1 [ms] = 2.6 [ms] delay time = 2 [ms}
I-1801
Communication parameter for sending process data via TPDO2
• For assignment of the data telegram see object
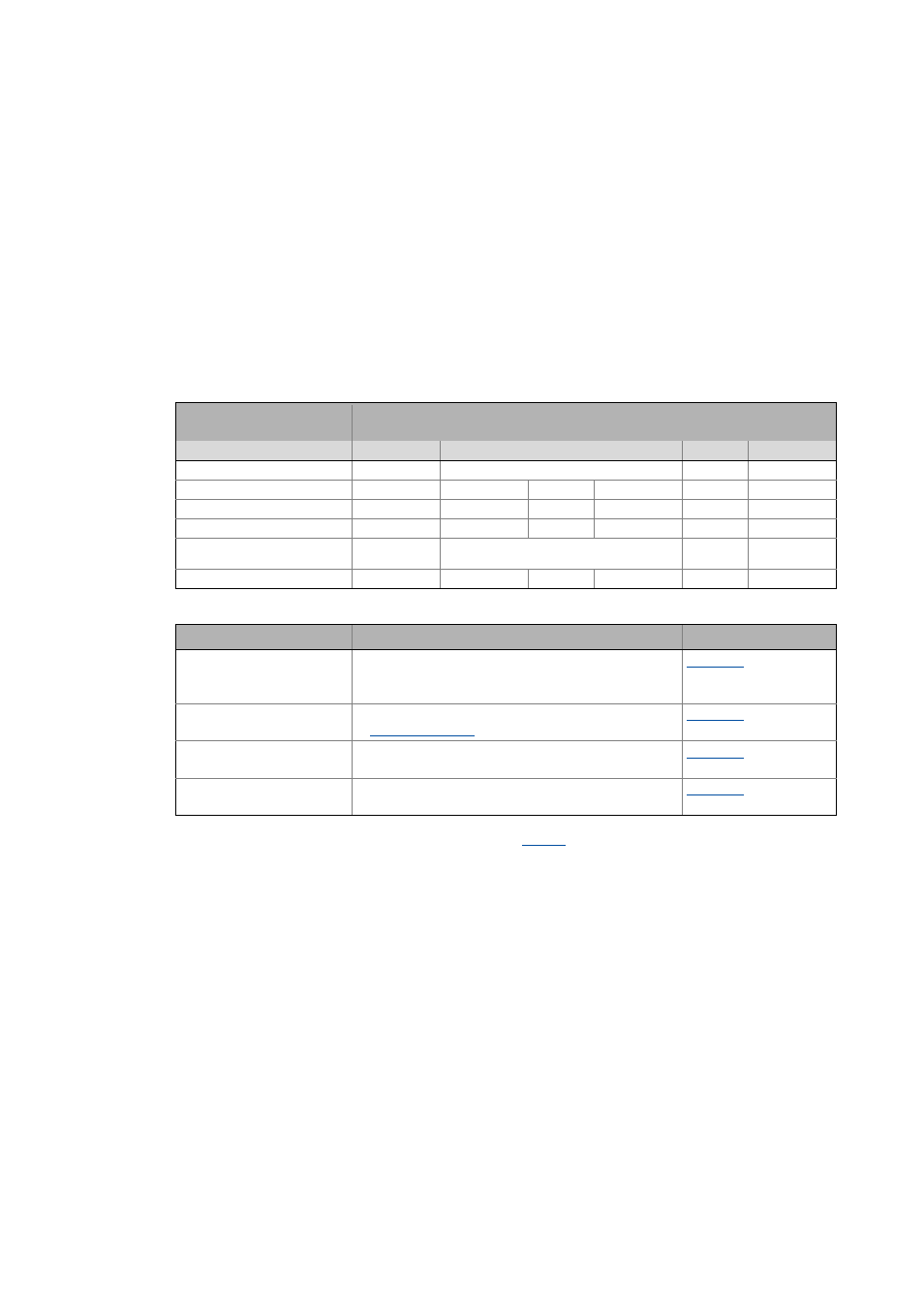
Index:
I-1801
Name:
TPDO2 communication parameter
Subindex
Default setting
Setting range (min. value | unit | max. value)
Access
Data type
0: Highest subindex supported
5
- (read access only)
ro
U8
1: COB-ID used by TPDO
0x280 + node ID
0
4294967295 rw
U32
2: Transmission type
254
0
255 rw
U8
3: Inhibit time
0 ms
0
0.1 ms
65535 rw
U16
4: Reserved
-
- (reserved, read or write access leads to error message
0x06090011)
rw
U8
5: Event timer
0 ms
0
ms
65535 rw
U16
Subindex
Meaning
Lenze code
1
TPDO2 identifier
• The basic setting is according to the "Predefined
Connection Set": Identifier = 0x280 + node ID
2
TPDO transmission type according to DS301 V4.02
3
Minimum time between sending two identical TPDOs
(see DS301 V4.02).
5
Cycle time for PDO transmission with transmission type
"254".