12 basic drive functions – Lenze E94AxPExxxx User Manual
Page 437
Lenze · 9400 Servo PLC· Reference manual · DMS 4.0 EN · 11/2013 · TD05/06
437
12
Basic drive functions
12.4
Manual jog
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
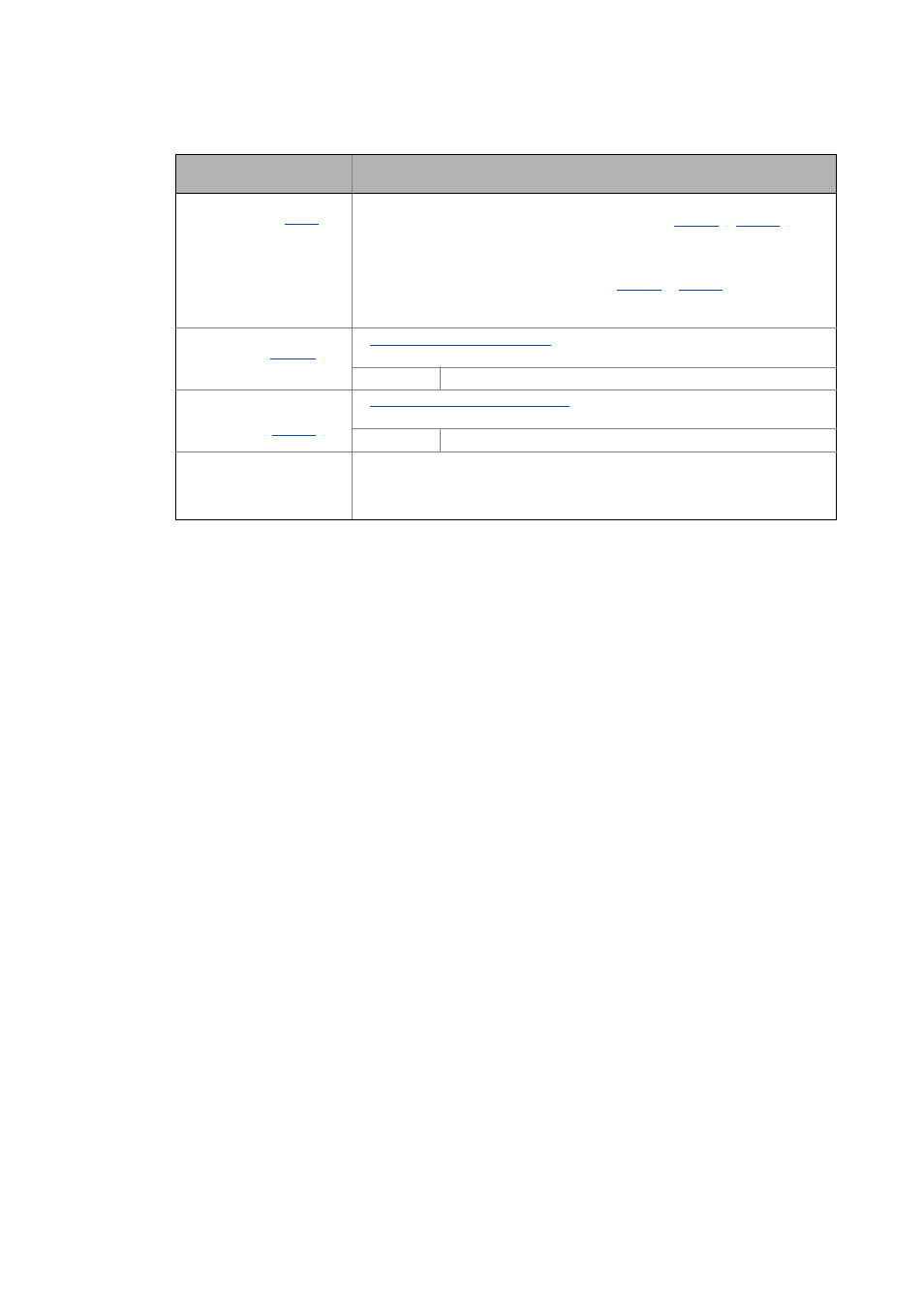
MAN_dnSpeedOverride_n
| DINT
Value for speed override
• Percentage multiplier for the currently active speed (
).
• In the case of active manual jog, the speed override is always active and does not
have to be activated separately.
• Changes are accepted in each cycle.
• 2
30
≡ 100 % of the speed parameterised in
.
• For values ≤ 1 % the status bit 19 is set.
• Values ≤ 0 % are set to 0 % internally and lead to the standstill of the drive.
MAN_bStepMode
| BOOL
Manual jog with step limitation ( 442)
• Only possible if the "Manual jog with intermediate stop" mode is not active.
TRUE Manual jog with step limitation active.
MAN_
bIntermediateStopMode
| BOOL
Manual jog with intermediate stop ( 443)
• This mode has a higher priority than the "Manual jog with step limitation" mode.
TRUE Manual jog with intermediate stop active.
MAN_FBData
Interface for the transfer of the function block instance data for determining the
positions for intermediate stop
• Connect this input to the output FBData of the function block instance of type
L_PosPositionerTable or L_PosProfileTable.
Identifier
DIS code | data type
Information/possible settings