Pole position identification, Ls_polepositionidentification, 12 basic drive functions – Lenze E94AxPExxxx User Manual
Page 603
Lenze · 9400 Servo PLC· Reference manual · DMS 4.0 EN · 11/2013 · TD05/06
603
12
Basic drive functions
12.14
Pole position identification
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
12.14.1
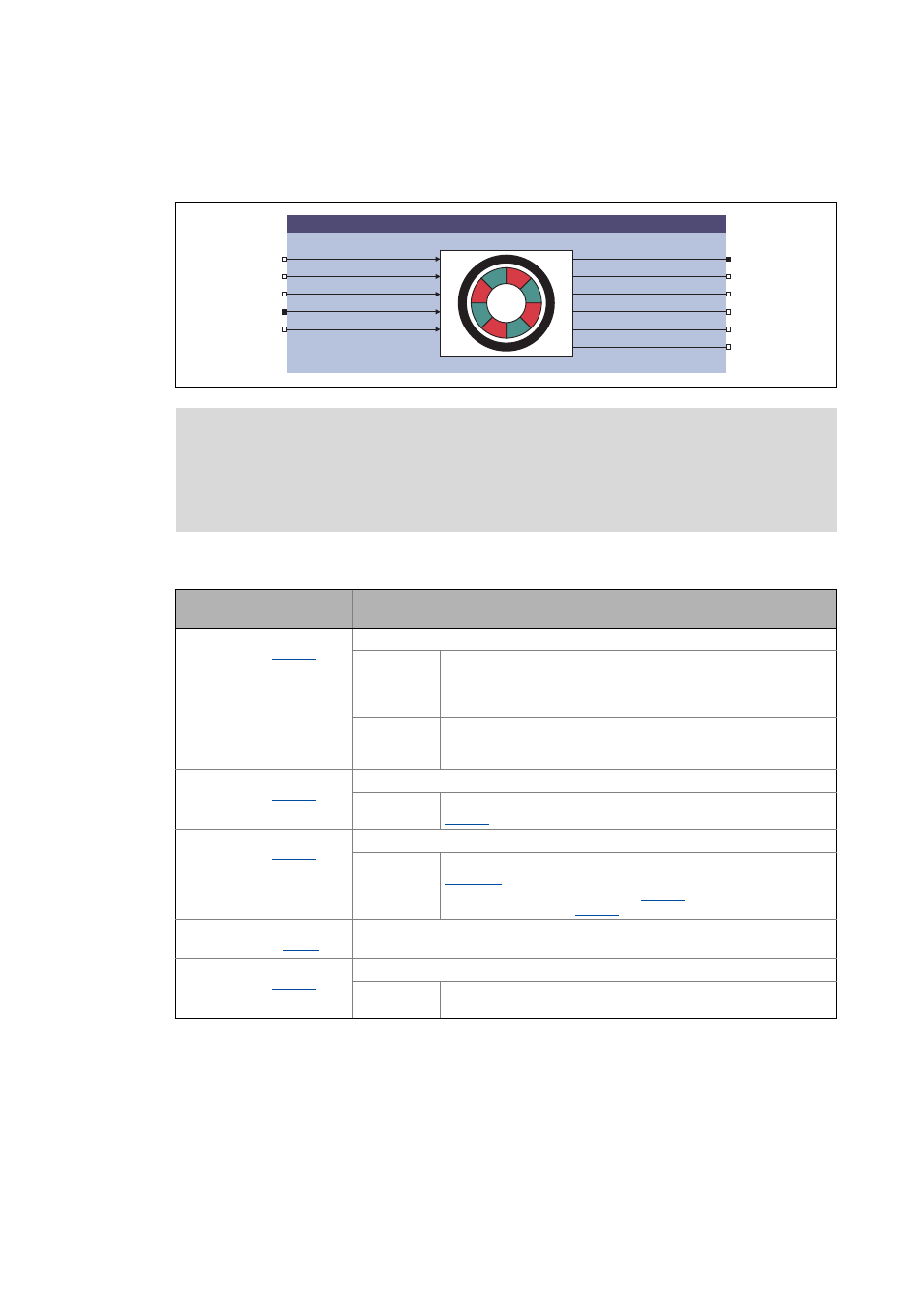
Internal interfaces | System block "LS_PolePositionIdentification"
Inputs
Note!
Ensure that the system block is called in a cyclic application task.
Basically, projects which only contain an unsolicited task and no cyclic task are not
permissible!
Identifier
DIS code | data type
Information/possible settings
PPI_bEnable
| BOOL
Requesting control via the basic function.
TRUE If no other basic function is active, a change-over to the
"Identification of pole position active" function state is effected and
an identification of pole position can be carried out via the control
inputs.
TRUEFALSE An active identification of pole position is stopped, i.e. a change-over
from the active "Identification of pole position active" function state
back to the "Controller not ready" basic state is effected.
PPI_bStart
| BOOL
Start pole position identification
FALSETRUE Pole position identification is started in the mode selected in
PPI_bLoadPolePosition
| BOOL
Start pole position identification
FALSETRUE The pole position angle applied at PPI_dnPolePosition is accepted in
• The subcode to be described of
depends on the motor
encoder selected in
.
PPI_dnPolePosition
| DINT
Pole position angle in [°] with one decimal position
• Value range: -179.9 ... +179.9 °
PPI_bResetPolePosition
| BOOL
Reset "Pole position known" status
FALSETRUE The status outputs PPI_bDone and PPI_bPolePositionAvailable are
reset to FALSE.
LS_PolePositionIdentification
PPI_bEnable
PPI_bLoadPolePosition
PPI_dnPolePosition
PPI_bResetPolePosition
PPI_bEnabled
PPI_bActive
PPI_bStart
PPI_dnState
PPI_bDone
PPI_bError
PPI_bPolePositionAvailable
S
N
N
S
N
S
S
N