2 system with motor encoder, System with motor encoder, 7encoder evaluation – Lenze E94AxPExxxx User Manual
Page 288
7
Encoder evaluation
7.3
Parameter setting
288
Lenze · 9400 Servo PLC· Reference manual · DMS 4.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
The selection "3: Position controller active" is additionally available in
• In contrast to the already existing selection "2: Position controller active (<= FW V5.xx)", this
selection considers the gearbox factor.
• Further explanations on this can be obtained from the following table:
7.3.2
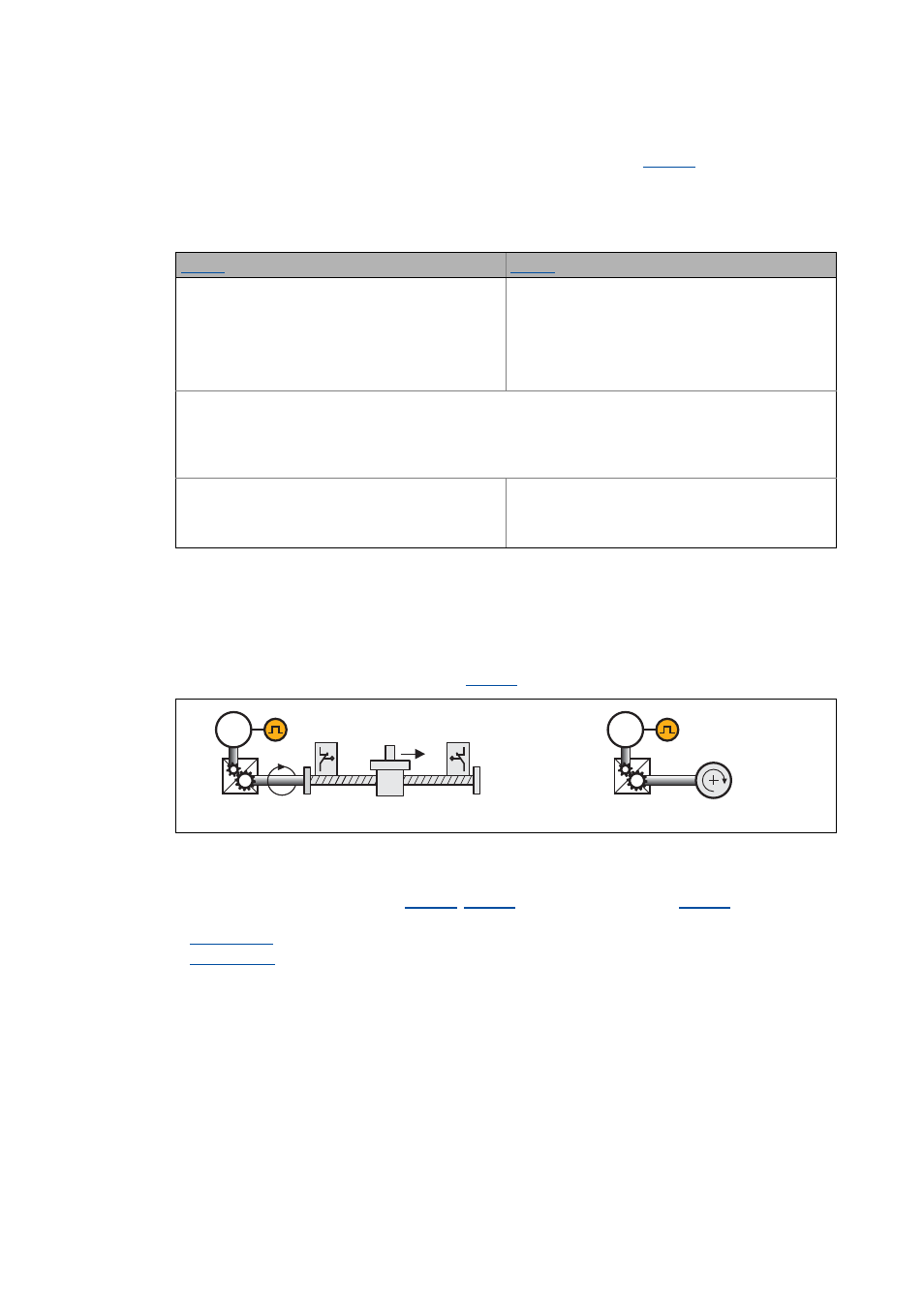
System with motor encoder
No encoder is installed on the load side. The motor position (angle of rotation) and motor speed are
detected via the motor encoder selected in
and are converted with regard to the load side.
[7-2]
Schematic diagram - feedback with position encoder = motor encoder
The actual position and actual speed values on the machine side result from the conversion via the
gearbox factor on the motor side (
) and the feed constant (
).
See also:
= 2: Position controller active (<= FW V5.xx)
= 3: Position controller active
When the separate position encoder at the output end is
used, the reference speed to the tool is assumed. This
causes the acceleration and deceleration times not to
refer to the motor but to the encoder.
In order to re-establish the motor reference, the desired
acceleration time of the corresponding function must be
multiplied by the resulting gearbox factor.
When the separate position encoder at the output end is
used, the reference speed is referred to the motor. Thus,
all acceleration and deceleration times are calculated
with regard to the reference speed at the motor.
Example:
• Motor reference speed (C00011) = 3000 rpm
• Resulting gearbox factor = 10
• Acceleration time = 1 s
With 10 % setpoint selection:
• Motor speed = 100 % (3000 rpm)
• Tool speed = 300 rpm
• Acceleration time up to 10 % setpoint selection
(100 % motor speed) = 0.1 s
• Motor speed = 10 % (300 rpm)
• Tool speed = 30 rpm
• Acceleration time up to 10 % setpoint selection
(10 % motor speed) = 0.1 s
Motor encoder
M
M