6motor interface, Stop – Lenze E94AxPExxxx User Manual
Page 181
Lenze · 9400 Servo PLC· Reference manual · DMS 4.0 EN · 11/2013 · TD05/06
181
6
Motor interface
6.3
Adjusting motor and controller to each other
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
• The ramp time can be adjusted proportionally in
.
• For large machines and high mass inertia values, the ramp time usually has to be increased.
• For small machines, a reduction of the ramp time can speed up the pole position
identification process.
• In some situations it may be helpful to reverse the travel direction (
) for the pole position
identification (e.g. for linear motor at the end stop).
• The "pole position identification 360°" procedure comprises a plausibility check. If the rotor
position determined via the encoder system does not correspond to the controlled output
position:
• the pole position identification procedure is aborted.
• the response parameterised in
(Lenze setting: "Fault") is activated.
• the error message "Pole position identification cancelled" is entered into the logbook of the
controller.
• The preset fault tolerance for the plausibility check can be changed via
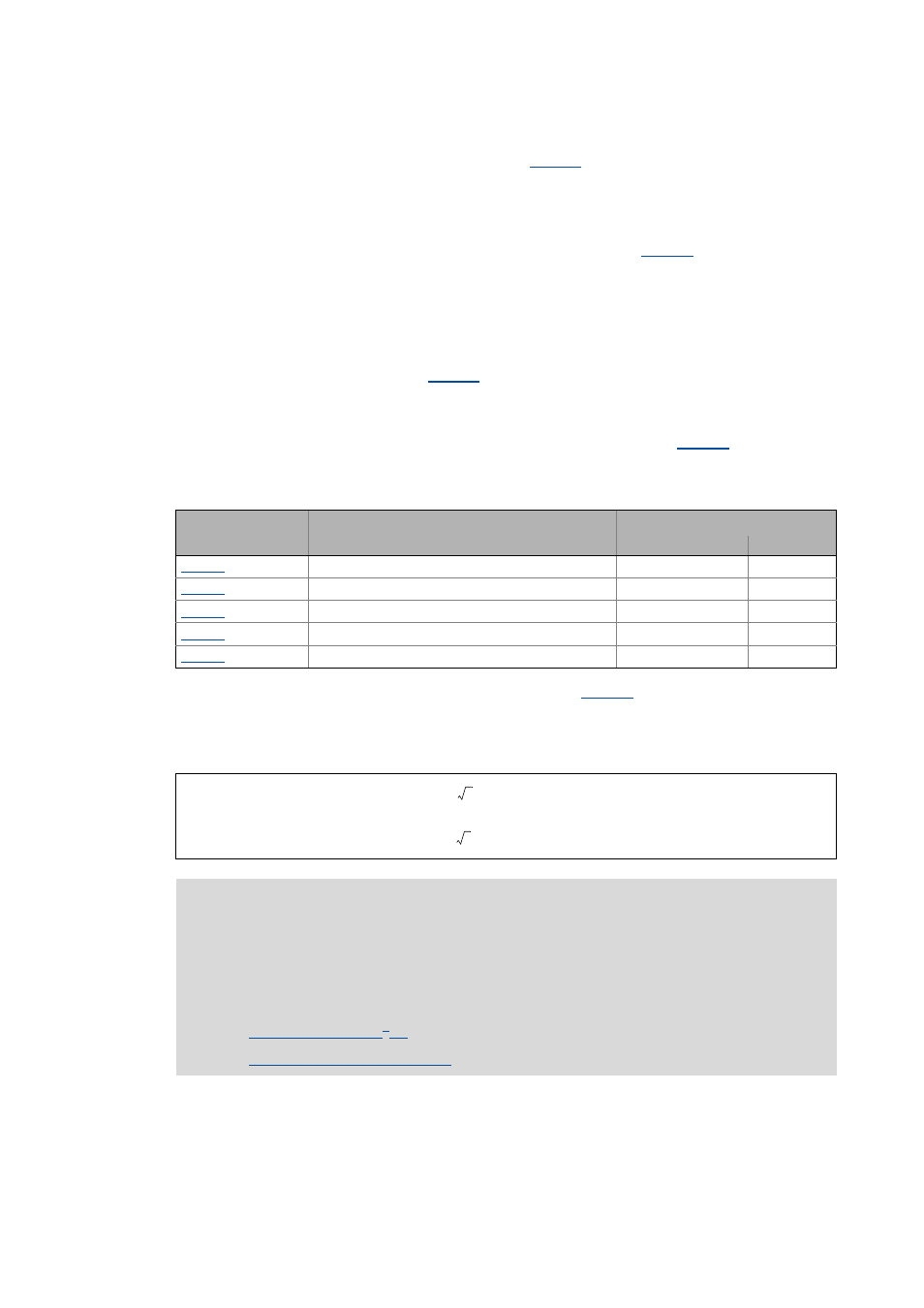
Parameters for the pole position identification with minimal movement
• The current amplitude can be adjusted proportionally in
• For large machines and high mass inertia values or for linear direct drives, the current
amplitude usually has to be increased.
• The Lenze setting "100 %" corresponds to the smaller of the two following values:
Parameter
Info
Lenze setting
Value Unit
PolePosId min.mov. cur. amp.
100 %
PolePosId min.mov. cur.rise rate
100 %
PolePosId min.mov. gain Vp
0
PolePosId min.mov. reset time Tn
62.5 ms
PolePosId min.mov. max.perm.mov.
20 °
or
Stop!
If there is no temperature monitoring in the motor and/or the I
2
xt motor monitoring and
the maximum current monitoring are not parameterised correctly, the motor may be
permanently damaged when the current amplitude is set too high (e.g. to the maximum
value)!
25 %
2 Rated device current
⋅
⋅
25 %
2 Rated motor current
⋅
⋅