4 limitations, 12 basic drive functions – Lenze E94AxPExxxx User Manual
Page 547
Lenze · 9400 Servo PLC· Reference manual · DMS 4.0 EN · 11/2013 · TD05/06
547
12
Basic drive functions
12.11
Limiter
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
12.11.2.4 Limitations
Limit values for the basic functions "
" and "
" can be set via the
following parameters:
• The parameters depend on the mechanics (e.g. the tool used).
• Usually the parameters must be changed when a tool is exchanged, e.g. by means of a recipe
management of a superimposed control or via an HMI ("Human Machine Interface").
• If the limit values are switched effectively and a limit value that is set is exceeded:
• The setpoints of the active basic function ("
" or "
changed (limited).
• The response parameterised in
(Lenze setting: "No response") is activated.
• A corresponding error message is entered into the logbook of the controller.
• A corresponding status is output via the LIM_dnState output.
• The display parameter "Limitation active" (
) is set to "1: Activated".
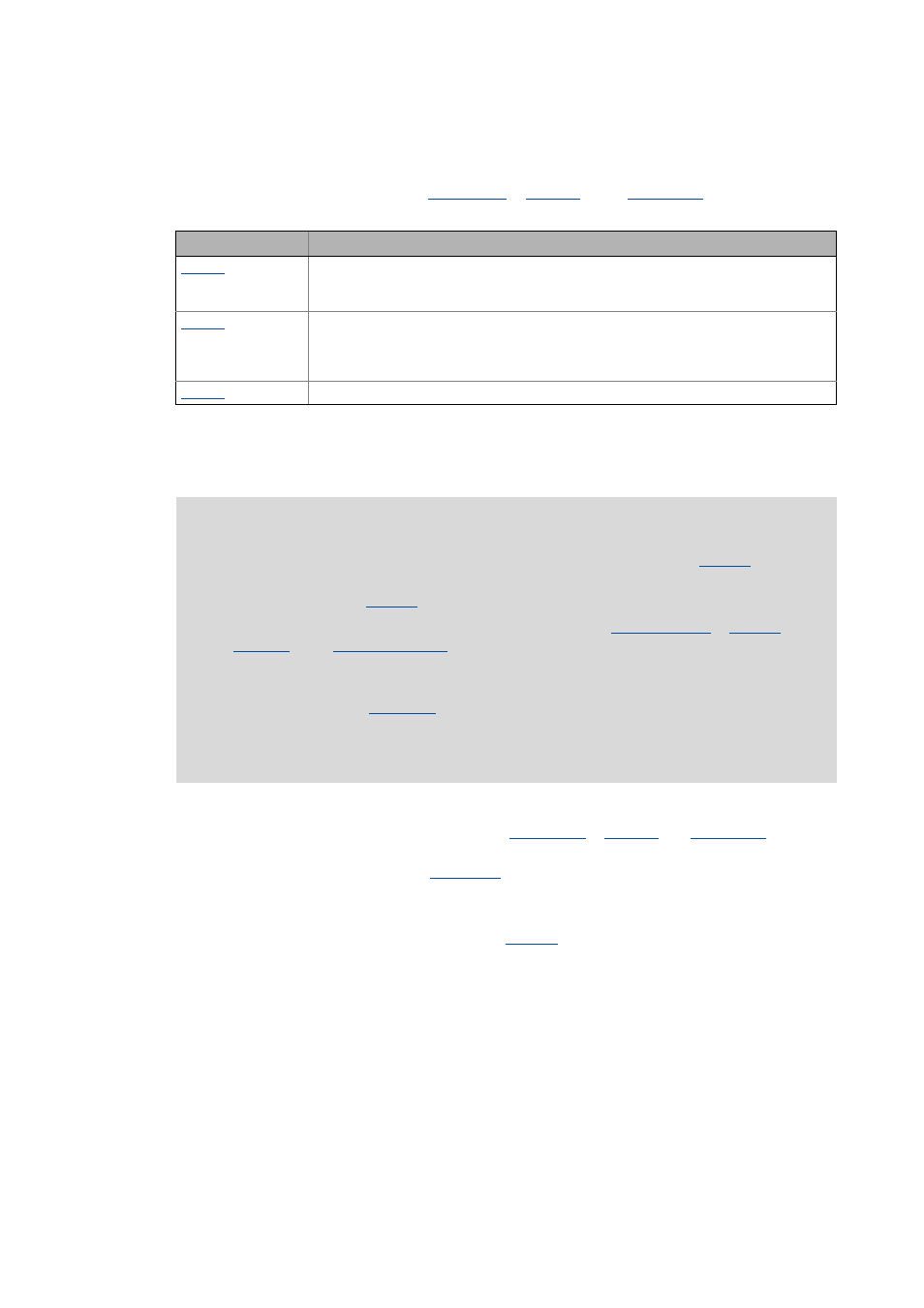
Parameter
Info
Max. speed
• Max. permissible speed that can be driven by the system.
• This parameter depends, among other things, on the max. motor speed.
Max. acceleration
• Max. permissible acceleration or deceleration for positioning processes.
• This parameter depends, among other things, on the motor torque and moment of
inertia of the entire mechanics which is driven during the positioning process.
Min. S-ramp time
Note!
In order that the set limit values are effective, "1" must be selected in
.
• Irrespective of this setting, basically, the speed setpoint is limited to the motor
reference speed (
The limitations are not effective for the basic functions "
• In case of these basic functions only speed and acceleration are monitored.
• If the limit values for speed and acceleration are exceeded, the response
parameterised in
is activated (Lenze setting: no response).
• Background: In the case of technology applications which are synchronised via an
electrical shaft, the setpoint followers may not be limited, since synchronism would
be lost by this. A possible consequence would be a collision of tools.