12 basic drive functions – Lenze E94AxPExxxx User Manual
Page 511
Lenze · 9400 Servo PLC· Reference manual · DMS 4.0 EN · 11/2013 · TD05/06
511
12
Basic drive functions
12.7
Positioning
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
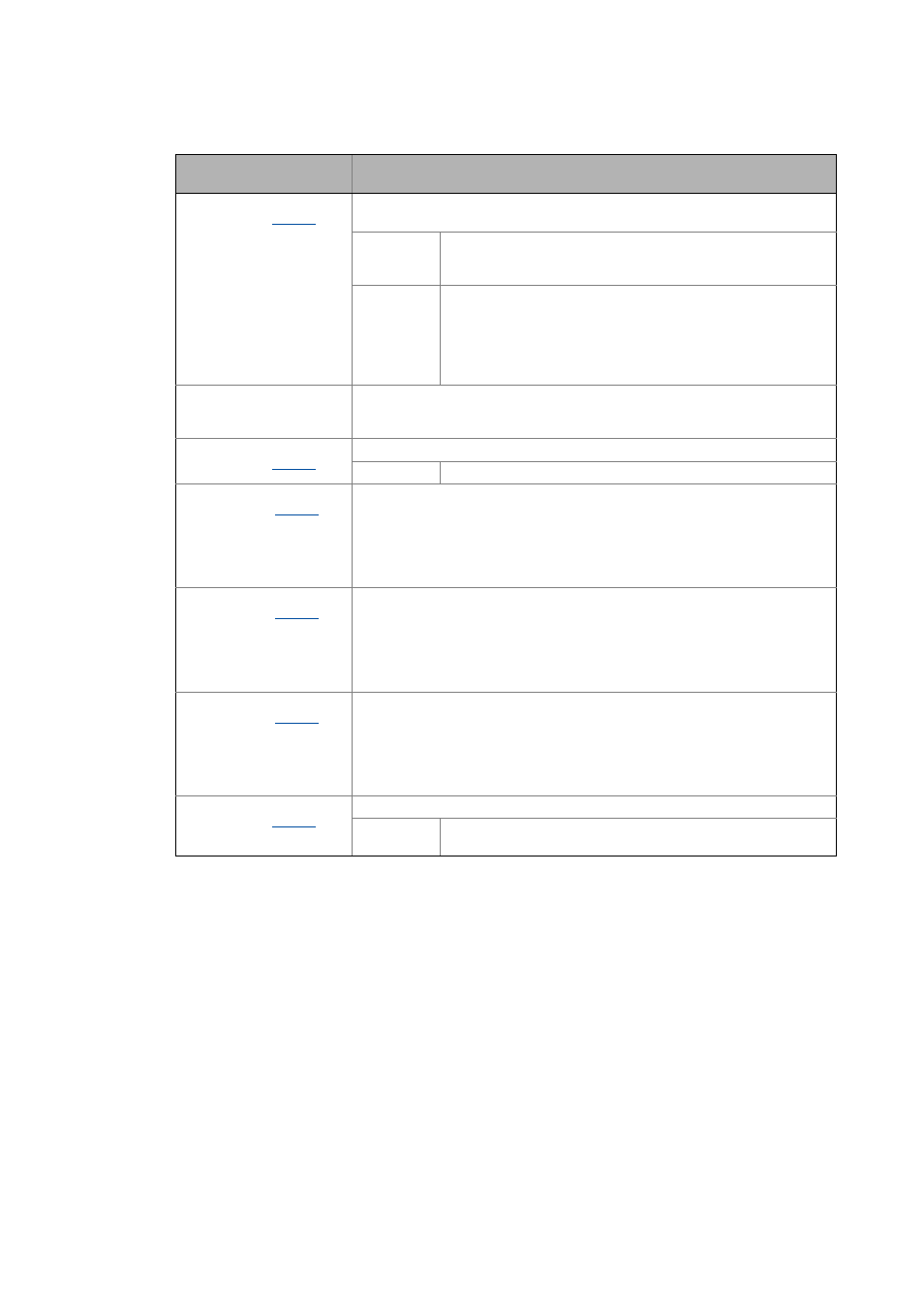
POS_bRestart
| BOOL
Continue interrupted positioning
• Only possible if POS_bAbort has been reset from TRUE to FALSE.
TRUE The positioning interrupted before via POS_bAbort is completed.
• Distances of a relative positioning that have already been covered
are taken into consideration.
FALSETRUE
(once again)
"Restart"
• During an active positioning process, another profile can be
specified via the input POS_ProfileData which is executed after
restart.
• Distances of a relative positioning that have already been covered
are taken into consideration.
POS_ProfileData
Pointer to the profile to be executed in internal units (increments)
• A profile linkage results from the fact that a pointer to the sequence profile is
contained within the profile.
POS_bEnableOverride
| BOOL
Activating override
TRUE Override of the speed, acceleration, and deceleration is active.
POS_dnSpeedOverride_n
| DINT
Value for speed override
• Percentage multiplier for the current profile parameter "Speed".
• Changes are accepted in each cycle.
• 2
30
≡ 100 % of the speed defined in the profile.
• For values ≤ 1 % the status bit 18 is set.
• Values ≤ 0 % are set to 0 % internally and lead to the standstill of the drive.
POS_dnAccOverride_n
| DINT
Value for acceleration override
• Percentage multiplier for the current profile parameter "Acceleration".
• Changes are accepted in each cycle.
• 2
30
≡ 100 % of the acceleration defined in the profile.
• For values ≤ 1 % the status bit 19 is set.
• Values ≤ 0 % are internally set to 0 % ("no acceleration").
POS_dnDecOverride_n
| DINT
Value for deceleration override
• Percentage multiplier for the current profile parameter "Deceleration".
• Changes are accepted in each cycle.
• 2
30
≡ 100 % of the acceleration defined in the profile.
• For values ≤ 1 % the status bit 19 is set.
• Values ≤ 0 % are internally set to 0 % ("no deceleration").
POS_bDisableTP
| BOOL
Deactivating touch probe positioning
TRUE Detected touch probes are ignored. There is no automatic change-
over to the TP sequence profile defined in the profile data.
Identifier
DIS code | data type
Information/possible settings