7encoder evaluation – Lenze E94AxPExxxx User Manual
Page 292
7
Encoder evaluation
7.3
Parameter setting
292
Lenze · 9400 Servo PLC· Reference manual · DMS 4.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
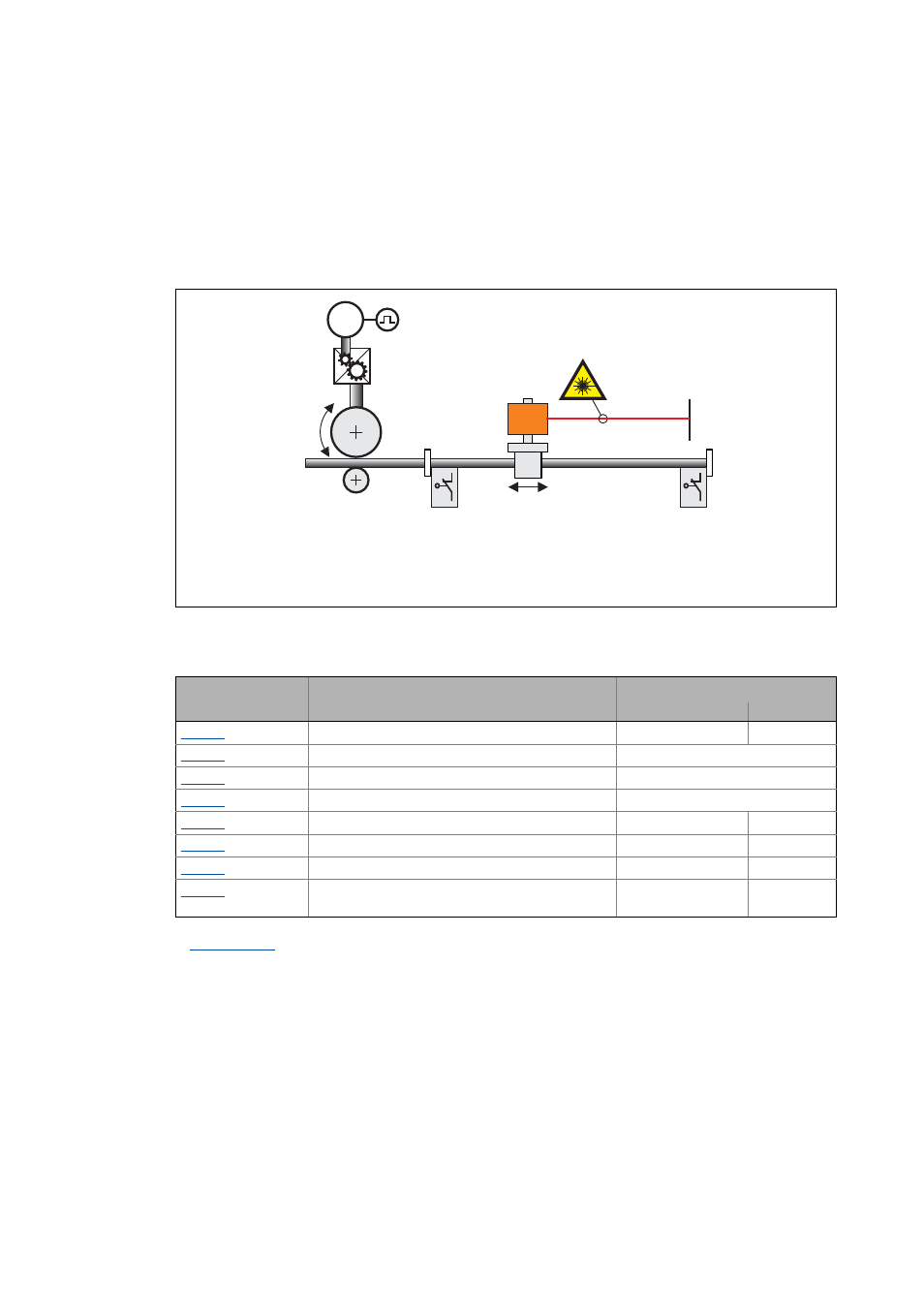
Example: Position encoder feedback with a laser distance measuring device
The current position of a positioning unit is detected with a laser distance measuring device (e.g.
»DME5000«) with a Hiperface® interface. A graduation of 0.1 mm has been parameterised in the
distance measuring device.
The positioning unit is moved by 848.23 mm in an axial direction for each revolution of the slip-free
drive roll. The current motor speed is detected by a resolver.
[7-6]
Schematic diagram of feedback with a laser distance measuring device
Short overview of the parameters:
See also:
Motor encoder
Laser distance measuring device
Feed
Laser beam hits reflective surface
Circumference of the drive roll = 848,23 mm
M
DME
5000
?
Parameter
Info
Lenze setting
Value Unit
Number of encoder increments
8482
Encoder type
Absolute value encoder (Hiperface)
Position encoder selection
Encoder on X8
Motor encoder selection
Resolver on X7
Gearbox factor numerator: position encoder
84823 -
Gearbox factor denominator: position encoder
84820
Feed constant
848.23 mm
Position control structure
Position controller is
active