5 synchronisation of pdos via sync telegram, 10 "can on board" system bus – Lenze E94AxPExxxx User Manual
Page 350
10
"CAN on board" system bus
10.6
Process data transfer
350
Lenze · 9400 Servo PLC· Reference manual · DMS 4.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
10.6.5
Synchronisation of PDOs via sync telegram
During cyclic transmission, one or more PDOs are transmitted/received in fixed time intervals. An
additional specific telegram, the so-called sync telegram, is used for synchronising cyclic process
data.
• The sync telegram is the trigger point for the transmission of process data from the slaves to the
master and for the acceptance of process data from the master in the slaves.
• For sync-controlled process data processing, the sync telegram must be generated accordingly.
• The response to a sync telegram is determined by the transmission type selected.
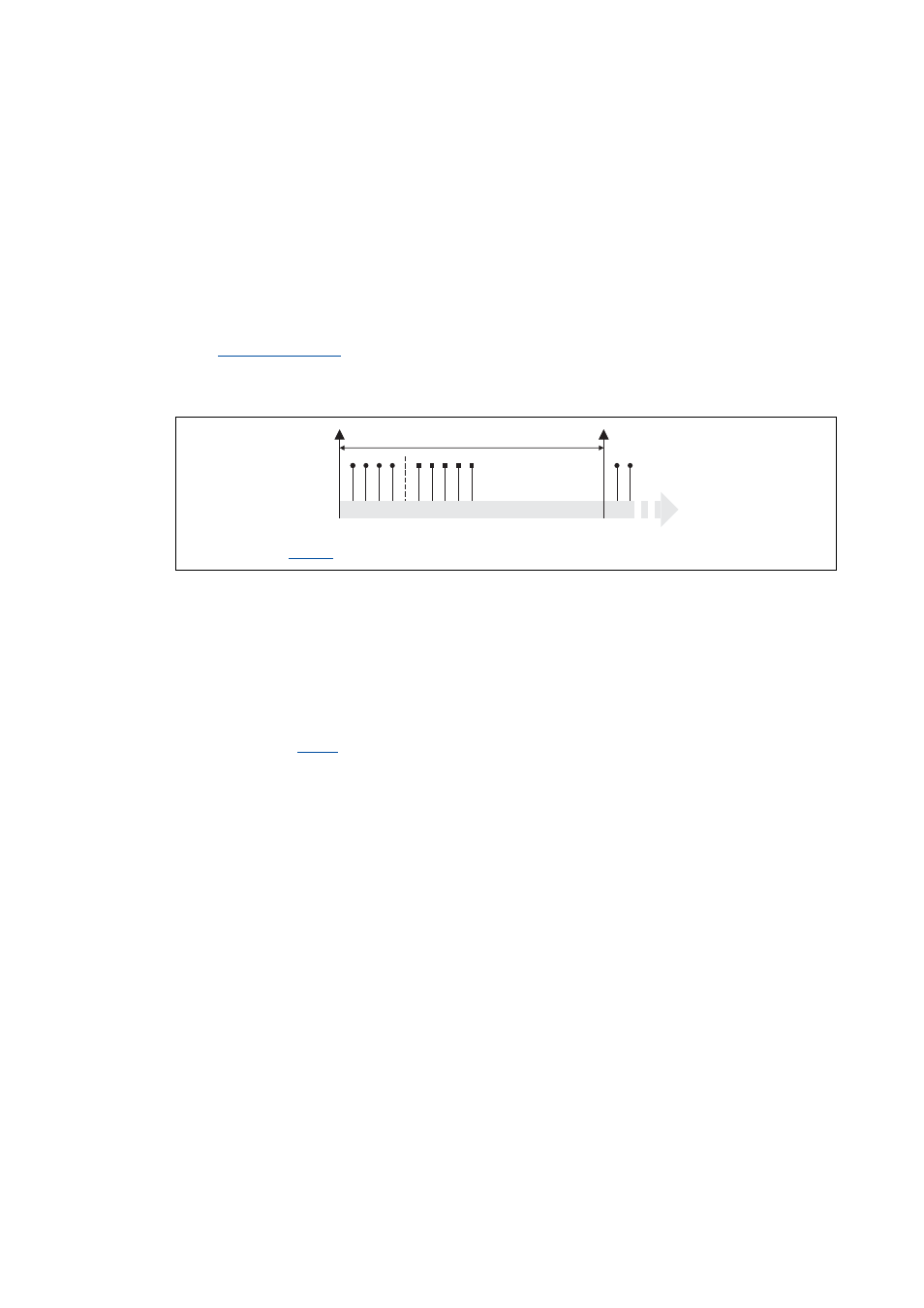
Basic workflow
[10-7] Sync telegram
A. After the sync telegram has been received, the slaves transmit the synchronous process data to
the master (TPDOs). The master reads them as process input data.
B. When the transmission process is completed, the slaves receive (RPDOs) the process output
data (of the master).
• All other telegrams (e.g. parameters or event-controlled process data) are accepted acyclically
by the slaves after the transmission is completed.
• Illustration
does not include acyclic data. However, they need to be considered when
dimensioning the cycle time.
C. The data are accepted in the slave with the next sync telegram if the Rx mode is set to 1 ... 240.
If the Rx mode is 254 or 255, the data are accepted in the next device cycle, irrespective of the
sync telegram.
Sync cycle time (
SYNC
SYNC
0
1
2