6motor interface, Stop – Lenze E94AxPExxxx User Manual
Page 196
6
Motor interface
6.4
Servo control (SC)
196
Lenze · 9400 Servo PLC· Reference manual · DMS 4.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Using the ramp response for setting the speed controller
When operation of the mechanics at the stability limit is not possible, the ramp response can be
used to set the speed controller. The proceeding is similar to optimising the current controller.
How to optimise the speed controller setting by means of the ramp response:
1. Run a typical speed profile and record the ramp response of the speed with the
• Motor control variables to be recorded:
Speed.dnSpeedSetpoint (speed setpoint)
Speed.dnActualMotorSpeed (actual speed value)
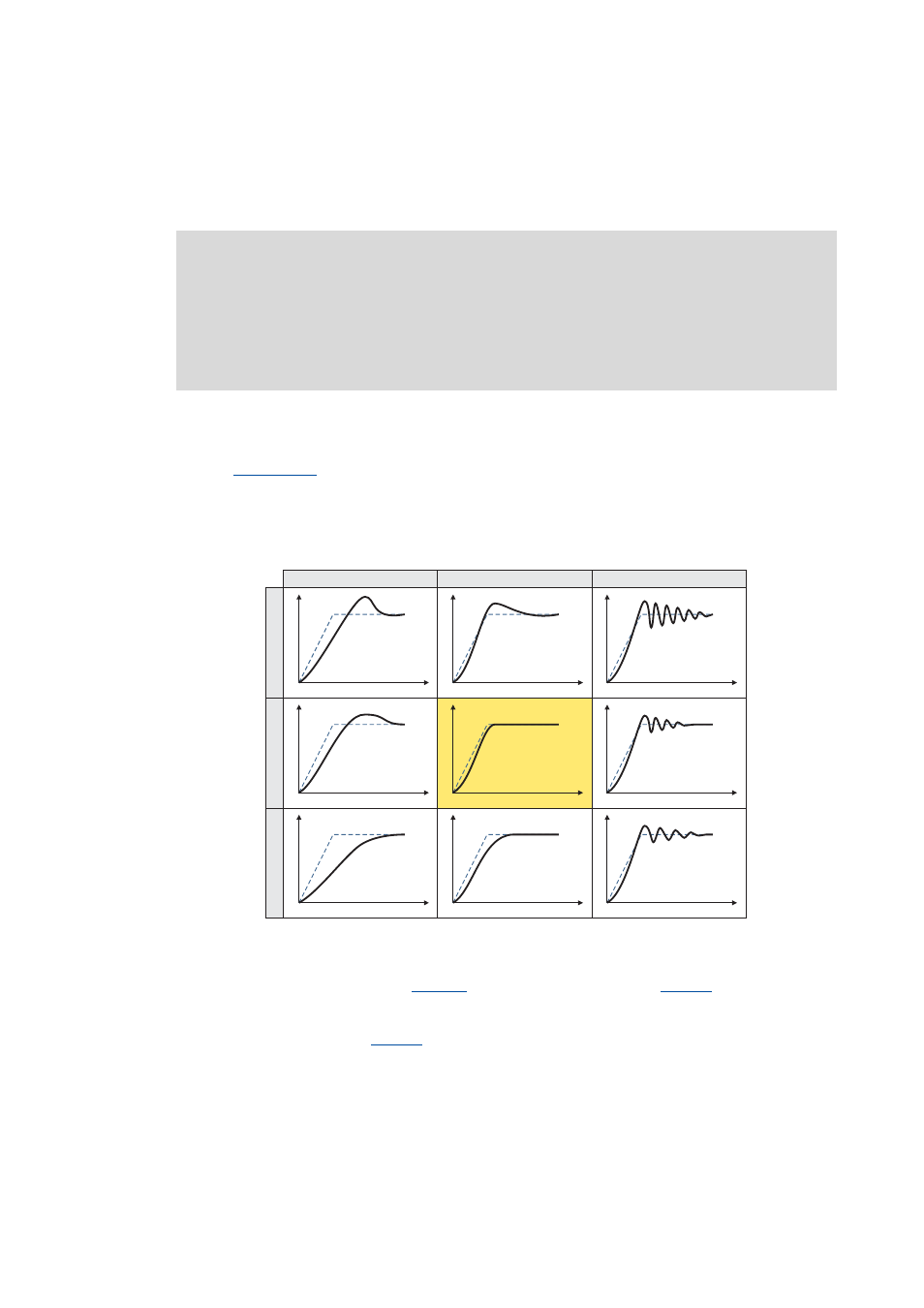
2. Evaluate the ramp response:
• Solid line = ramp response (actual speed value)
• Dash line = speed setpoint
3. Change the gain Vp under
.
4. Repeat steps 1 ... 3 until the optimum ramp response is reached.
5. Save parameter set (
= "11").
Stop!
If the controller parameters are preset unfavourably, the control can tend to heavy
overshoots up to instability!
• Following and speed errors can adopt very high values.
• If the mechanics are sensitive, the corresponding monitoring functions are to be
activated.
n
t
n
t
n
t
n
t
n
t
n
t
n
t
n
t
n
t
Vp < Vp opt.
Vp = Vp opt.
Vp > Vp opt.
Tn
<
T
n
opt.
Tn
=
T
n
opt.
Tn
>
T
n
opt.